VE180 - 室内/室外人员移动跟踪
VE180 非常适用于室内/室外人员移动跟踪应用。典型部署包括商用建筑。此视频引擎可用于人数统计和停留时间等应用。
仅提供理想的设置。这些设置并非强制性要求。VE180 是一种强大的分析工具。
例如,在人们过路或一起走路的情况下,并且您想要将他们作为单个对象来进行跟踪,这时便可使用 VE180 引擎(VE150
或 VE250 以上版本)。请注意 VE180 通常比 VE150 和 VE250 引擎需要更多 CPU。
理想摄像头设置
设置 |
理想条件 |
环境 |
• 远离电梯门等移动中的物体,或购物车、婴儿车和大件行李等被移动的
物体。
• 不要将摄像头安置在靠近扶梯或楼梯的位置。确保在平坦的水平表面跟踪人物,以得出准确的检测结果。
• 确保人物在摄像头中完全可见,而不是被货架或矮墙等遮住一部分。 |
照明 |
• 至少 75 LUX 或更高。
• 确保在检测空间内,以及在跟踪人物的时间段内具有一致的照明条件。
• 确保在跟踪人物的区域不存在发光物体,如发光的地板。发光地板会反射周围区域的光/阴影,产生错误计数。
• 在室内跟踪区域,应尽量避免外部光照。日光偶尔会被移动的云团遮挡,从而在计数线上投下阴影。
• 根据室内光线的角度,从计数线旁走过(而不是跨过计数线)的人物投下的阴影可能会造成错误计数。 |
计数线 |
• 垂直向下视图对于统计跨过线的人数往往更加准确,但在天花板较低的情况下,垂直向下视图相较于
45 度视图能够覆盖的地面面积较小。
• 在计数线的两侧,应尽量留出至少
1 米的地板空间。
• 在角度视图中,应尽量在计数线的两侧留出至少
2 米的空间。
• 设置人的尺寸:跨过线的人,在宽度上不得占据视图的
1/3 以上,在高度上不得占据视图的 1/2 以上。 |
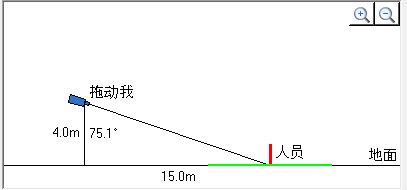
摄像头放置 |
• 请注意,对于接近水平的视图,准确性会有所降低(例如,夹角小于
20 度)。
• 如果摄像头放置的位置导致人物在屏幕上显示的尺寸小于
20 像素,则计数准确性将有所下降,此时需要使用高级选项设置。 |
任务 1:配置 VE180
配置 VE180:
1. 在 Symphony 的“服务器”菜单中,选择“配置”。此时将打开“配置”对话框。此对话框用于配置当前选定服务器的设备。
2. 在左窗格中,单击“设备”。此时将打开“设备”对话框。
3. 单击要配置用于视频分析的摄像头,然后单击“编辑”。
4. 单击“分析引擎”选项卡并选择 VE180。默认情况下,将选择“VE250”,此种情况下,您必须先取消选择“VE250”。
5. 单击“分析配置”选项卡( 概述选项卡
- VE180 分析配置)。在“分析引擎”下拉列表中,选择“Intel_VE180”。
6. 单击“选择图像”按钮,从以之为分析配置基础的摄像头中选择图像。
7. 单击所有必要的子选项卡,配置分析:
• 概述子选项卡
• “处理面罩”子选项卡
• “摄像头位置”子选项卡
• “环境”子选项卡
• “计数线”子选项卡
• “高级”子选项卡
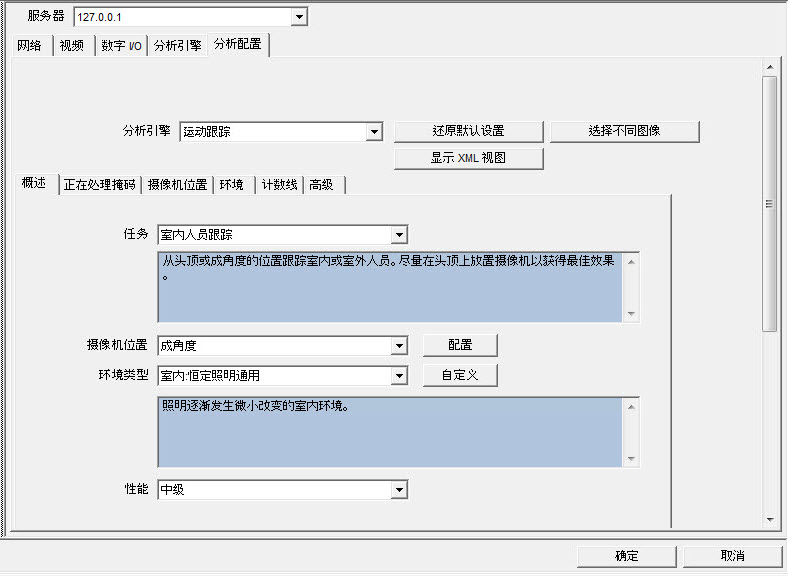
概述子选项卡
概述选项卡 - VE180 分析配置
1. 从“任务”下拉列表中,选择“室内人员移动跟踪”、“室外多类物体跟踪”或“脸部跟踪”。
室内人员移动跟踪
1. 从“摄像头位置”下拉列表中,选择“成角度”或“头顶”。
2. 从“环境类型”下拉列表中,选择以下选项中的其中一项。
• 室内:可变照明通用
• 室内:恒定照明通用
• 室内:零售 -(恒定照明)
• 自定义 - 如从“环境”选项卡或“高级”设置中的默认值更改为其他设置,将自动显示。
3. 从“性能”下拉列表中,选择 CPU 处理的级别:自定义、低级、中级、高级。默认情况下,将选择“中级”。 |
室外多类物体跟踪
1. 从“摄像头位置”下拉列表中,选择“成角度”、“头顶”或“未校准”。
• “Uncalibrated”(未校准)- 仅在物体划分明确且不要求准确计数的情况下使用。
2. 从“环境类型”下拉列表中,选择以下选项中的其中一项。
• 室外:通用
• 室外:水
• 室外:热感摄像头
• 自定义 - 如从“环境”选项卡或“高级”设置中的默认值更改为其他设置,将自动显示“自定义”设置。
3. 选择要检测的物体类别:人物、车辆或未知。
4. 从“性能”下拉列表中,选择 CPU 处理的级别:自定义、低级、中级、高级。默认情况下,将选择“中级”。 |
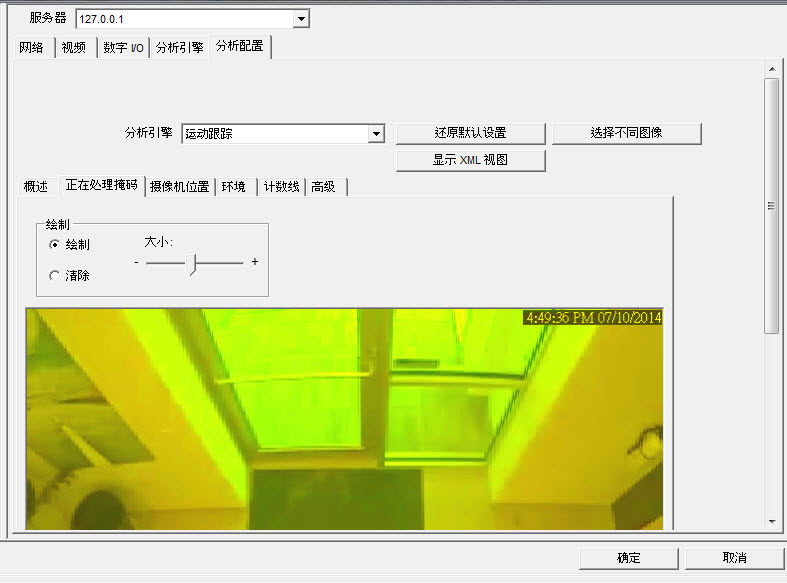
“处理面罩”子选项卡
“处理面罩”选项卡
1. 使用显示的视频图像,定义应在其中检测移动对象的黄色区域(面罩)。(面罩:Symphony
跟踪物体所在的区域。)
• 选择“擦除”选项可擦除黄色面罩。
• 选择“绘制”选项可绘制黄色面罩。
• “大小”滑块可调整笔粗细。
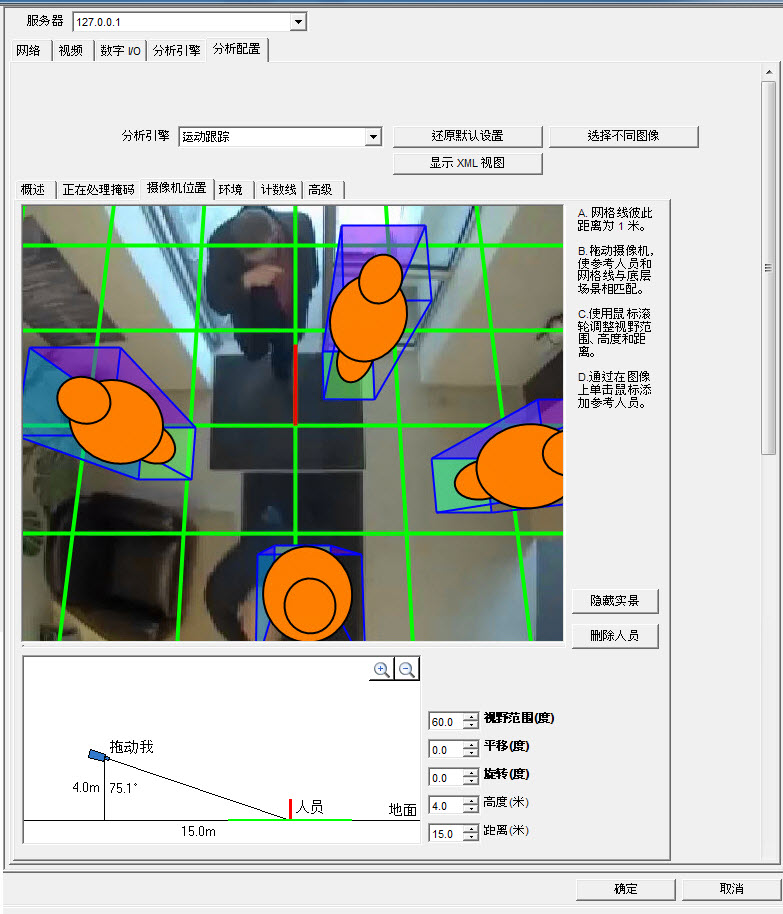
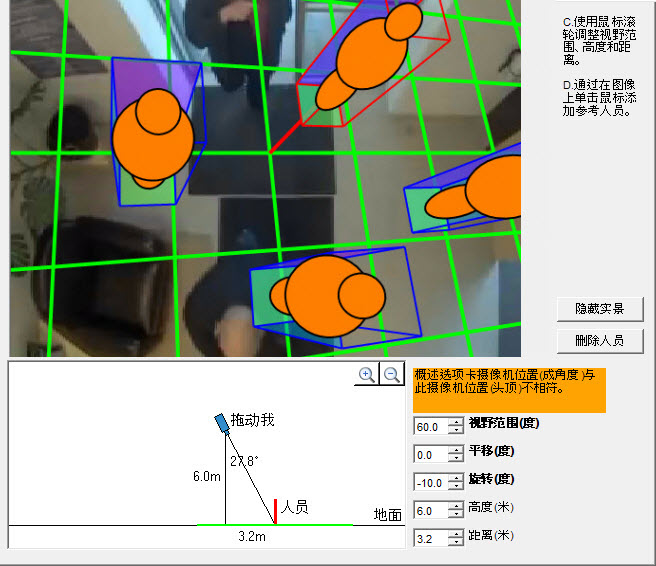
“摄像头位置”子选项卡
“摄像头位置”选项卡
“摄像头位置”子选项卡
选项/设计 |
说明 |
网格 |
网格线彼此距离为
1 米。
自动在场景上显示。 |
参考人物图标 |
橙色图形表示图像中的人物尺寸和位置。
四个人物图标将自动填充图像。
按照一般情况下可能出现的状态,将参考人物图标移动到图像中的不同位置,例如前景和背景。
要添加更多参考人物图标,请在图像上单击鼠标。 |
“删除人物”按钮 |
移除参考人物图标。
单击参考人物图标,然后单击“删除人物”按钮。 |
“隐藏/显示实景”
按钮 |
隐藏(或显示)网格线及参考人物图标,以便在图像中查看实际场景。 |
交互部分 |
可用于调整网格及参考人物尺寸,使之与底层场景相匹配。
使用鼠标,可将摄像头图标向上、下、左、右四个方向拖动。 |
+/-
放大图标 |
可用于在交互部分放大和缩小 |
视野范围
(FOV) |
水平视野范围。
如增大范围的值,则必须将摄像头图标拖得更近(向下)以达到正确的人物尺寸。
如缩小范围的值,则必须将摄像头图标拖得更远,以大致达到相同的尺寸。
如通过测量实际高度和距离获得准确的摄像头位置,则必须调整“视野范围”,使参考人物图标在场景中的大小合适。
允许您控制场景的透视度,而不更改整体比例。(允许您将人物图标设置成特定尺寸,并更改“视野范围”,从而使其他人物图标倾斜度及其相对尺寸符合要求。)
将鼠标指针置于小图上。滚动鼠标滚轮,以
2.5 度增量增大或缩小“视野范围”,并使用离地距离参数创建相对比例变化。
示例:离地距离是
10.0 米,“视野范围”是 60 度。鼠标滚轮滚动一下可将“视野范围”更改为 62.5 度,可将离地距离更改为 (60/62.5)*10.0 =
9.6 米。鼠标滚轮反向滚动一下可将“视野范围”更改为 57.5 度,可将离地距离更改为
(60/57.5)*10.0 = 10.43 米。 |
平移 |
摄像头绕着穿过摄像头的虚构的垂直轴,从左侧移动到右侧,或从右侧移动到
左侧。
当摄像头对着地面时,一般都会使地平面出现倾斜的效果。当摄像头的位置更
接近水平时,呈现出来的效果就更像是旋转的地平面。
此时,可以对着地平面“平移”倾斜网格,因为就实际场景而言,此时的地平面呈现效果是错误的。
在接近垂直向下的视图中,摄像头对着侧面监视时(即:垂直方向的偏斜并不完全在摄像头视图的上下方向轴上),此功能最为有用 |
旋转 |
以穿过视图中心直接延伸到摄像头之外的轴为中心进行的摄像头旋转。
在摄像头略有转动,使得实景中的垂直线与图像中的上下方向线不对应的角度视图中,此功能非常有用。当图像中的地面在呈现效果上从左向右有些许倾斜时,也可以使用此功能 |
“高度”和“距离”字段 |
与摄像头图标在交互部分的移动相对应的值。 |
警告消息 |
如摄像头的角度与“垂直向下”选择不一致,Symphony 会显示警告消息 |
“环境”子选项卡
1. 在此子选项卡中,根据摄像头录制图像所处的环境选择背景模型。有关使用方法,请参见表
“背景模型”用法
背景模型 |
何时使用 |
静态 |
在背景处于相对静止状态的情况下使用(背景不会定期移动,例如,摇曳的树木)。这是速度最快的
Symphony 背景模型。 |
动态 |
在存在定期移动的对象的情况下使用(例如,在风速非常恒定的风中来回摇动的树枝或因摄像头安装不稳定导致的移动对象)。此背景模型可处理静态和动态背景,但同“静态”模型相比,它需要使用更多的 CPU 功耗,因此建议不要将其用于静态背景。
重要信息:某个环境可能会在白天显示为静态,但夜间的降雨将生成动态环境。因此,您应当选择“动态”设置。 |
双层动态 |
与“动态”背景模型类似,但能跟踪在短时间内处于静止状态的对象。
用于要跟踪的区域,例如,在 30 至 60 秒内站立不动的人。 |
时空 |
仅跟踪稳定移动,因此,此模型可以极大地减少可在风中随机移动的树枝及其他背景对象所导致的错误警报。 |
“Multi-Layer Hybrid”(多层
混合) |
使用颜色、亮度和纹理信息。通过调整指定场景中强度、颜色或纹理信息的灵敏度,可以针对不同场景进行自定义设置。还可利用多范围处理,融合不同范围的信息。 |
2. 根据需要,选择“环境”子选项卡中的其他选项。有关所有背景模型的详细信息,请参见表 :
用于所有背景模型的“环境”子选项卡选项
选项 |
说明 |
默认设置 |
通用 |
背景学习时间(秒) |
确定前景对象处于静止状态以便合并到背景中所需的大致时间长度。
重要信息:如果某个对象定期移动的周期大于指定时间,该对象将始终视为前景对象(永远不会合并到背景中)。
背景根据视频的上一“更新背景秒数”确定。
背景不仅会在分析引擎启动时更新,还会一直进行更新。 |
30 |
背景灵敏度 |
设置将对象检测为前景对象所需的最小背景灵敏度。
重要信息:如果设置为较小的值,则与背景具有相似颜色的对象将不会作为要跟踪的有效对象被检测出来。 |
中 |
学习正常行为 |
学习每个像素处于运动状态并且可在随后忽略的时间百分比。例如,此选项对跟踪水面上的船只非常有用。 |
错误(未选中复选框) |
大规模更改检测 |
方法 |
“% of screen change”(屏幕比例变化):监视被视为前景的场景比例。如果前景比例过高,将触发模型再学习。
“Brightness change”(亮度变化):监视场景中突然出现的整体亮度变化(可能由光线变化或天气活动造成)。
“Spectrum change”(光谱变化):监视场景中突然出现的整体亮度变化,但对局部变化灵敏度较差(例如:身着深色外套的人走过)。
“Combined change”(组合变化):“% of screen change”(屏幕比例变化)与“Spectrum
change”(光谱变化)的结合。选择“environment: Indoor/outdoor generic”(环境:室内/室外通用)(具有可变或恒定照明条件)时,默认情况下会将相应的灵敏度设置为
70%。 |
滑块灵敏度
20% |
灵敏度 |
灵敏度的值范围在
0 到 100 之间。灵敏度高意味着再学习更容易触发。例如,灵敏度的值在 80 时,当只有 20% 的屏幕为前景时就会触发再学习,而在灵敏度较低时,只有在极端情况下才会触发再学习。 |
(滑块
20,
总数 100) |
在恢复跟踪前等待的时间(秒) |
可用于对恢复物体跟踪前要等待的时间进行设置。理想情况下,该选项应为零,但是,如果您发现立即开始跟踪时的照明问题可导致错误警报,请将此选项设置为光线处于稳定状态所需的秒数。 |
3 |
3. 有关每种背景模型中的其他“环境”子选项卡选项,请参见以下内容:
• 用于“静态”背景模型的“环境”子选项卡选项
• 用于“动态”背景模型的“环境”子选项卡选项
• 用于“双层动态”背景模型的“环境”子选项卡选项
• 用于“时空”背景模型的“环境”子选项卡选项
• 用于“Multi-Layer Hybrid”(多层混合)背景模型的“环境”子选项卡选项
用于“静态”背景模型的“环境”子选项卡选项
选项 |
说明 |
默认设置 |
阴影/照明去除 |
阴影灵敏度 |
控制在跟踪移动物体时忽略阴影(照明减弱)的积极程度。(向右)增大滑块将使引擎正确忽略更多阴影区域。
注意:这还会增大将浅色背景中身着深色衣服的人分类为阴影的可能性。 |
中等(禁用) |
照明灵敏度 |
控制忽略照明增强的积极程度。车前灯等光源或当阴天变为晴天时将导致照明增强。(向右)增大滑块将使引擎正确忽略任何照明增强效果。
注意:这还会增大将深色背景中身着浅色衣服的人分类为照明增强的可能性。 |
中等(禁用) |
跟踪缓慢移动的物体 |
跟踪缓慢移动的
物体 |
跟踪在视频中移动速度极慢的物体。该物体也可以是直接移向或直接移离摄像头,其移动速度看起来非常缓慢。
如果禁用“跟踪缓慢移动物体”,这些缓慢移动的物体往往会成为背景的一部分,这样便不会对其进行跟踪。启用此选项后便可跟踪这些缓慢移动的物体。
重要信息:在某个物体于视频中长期保持不动的情况下,此选项可能会增加一些错误警报。 |
错误(未选中复选框) |
物体速度 |
被跟踪物体的速度。 |
缓慢 |
|
删除影子像素 |
其值在一段时间内保持不变的任何像素都不会视为近景。 |
True |
用于“动态”背景模型的“环境”子选项卡选项
选项 |
说明 |
默认设置 |
阴影/照明去除 |
阴影灵敏度 |
控制在跟踪移动物体时忽略阴影(照明减弱)的积极程度。(向右)增大滑块将使引擎正确忽略更多阴影区域。
注意:这还会增大将浅色背景中身着深色衣服的人分类为阴影的可能性。 |
中等(禁用) |
照明灵敏度 |
控制忽略照明增强的积极程度。车前灯等光源或当阴天变为晴天时将导致照明增强。(向右)增大滑块将使引擎正确忽略任何照明增强效果。
注意:这还会增大将深色背景中身着浅色衣服的人分类为照明增强的可能性。 |
中等(禁用) |
跟踪缓慢移动的物体 |
跟踪缓慢移动的
物体
|
跟踪在视频中移动速度极慢的物体。该物体也可以是直接移向或直接移离摄像头,其移动速度看起来非常缓慢。
如果禁用“跟踪缓慢移动物体”,这些缓慢移动的物体往往会成为背景的一部分,这样便不会对其进行跟踪。启用此选项后便可跟踪这些缓慢移动的物体。
重要信息:在某个物体于视频中长期保持不动的情况下,此选项可能会增加错误警报。 |
错误(未选中复选框) |
物体速度 |
被跟踪物体的速度。 |
缓慢 |
|
检测云干扰 |
尝试忽略云移动。 |
False |
检查突发的背景
运动 |
尝试删除因背景物体在风中的突然运动导致的错误跟踪。它还将消除因摄像头突然移动导致的错误跟踪。 |
False |
像素间的最大距离 |
如果选择“检查突发的背景运动”。
突发运动的定义是高达此像素的物体或摄像头的移动。 |
5(禁用) |
删除影子像素 |
其值在一段时间内保持不变的任何像素都不会视为近景。 |
True |
用于“双层动态”背景模型的“环境”子选项卡选项
选项 |
说明 |
默认设置 |
计时 |
用于清除长期背景的时间(秒) |
仅适用于“双层动态”和“Multi-Layer
Hybrid”(多层混合)背景模型。 |
• 120
• 700
- 室内:
零售 |
用于清除短期背景的时间(秒) |
仅适用于“双层动态”背景模型。 |
• 5
• 1
- 室内:零售 |
将短期背景移动到长期背景的时间(秒) |
仅适用于“双层动态”和“Multi-Layer
Hybrid”(多层混合)背景模型。 |
• 60
• 600
- 室内:
零售 |
灵敏度 |
外观 |
“手动”、“明亮”、“暗灰” |
预设值 |
下限 |
如果选择“手动” |
0.40 |
上限 |
如果选择“手动” |
1.50 |
用于“时空”背景模型的“环境”子选项卡选项
选项 |
说明 |
默认设置 |
模型特定 |
模式 |
“连贯的移动”、“不正常的行为”、“错误方向”
该背景模型可跟踪稳定移动,自动检测不正常的行为或仅跟踪指定方向的移动:
“连贯的移动”- 跟踪稳定移动;因此,可极大地减少因不连贯移动而造成的错误警报,例如,可在风中随机移动的树枝及其他背景物体。
“不正常的行为”- 此背景模型会记住每个轴上正常的移动形式和方向;因此,任何异常的移动方向都会被检测出来。
“错误方向”- 仅跟踪指定方向的移动;因此,任何其他方向的移动都会被忽略。 |
连贯的运动 |
外观边缘化 |
仅检测移动模式,且不受外观影响。 |
True |
背景帧 |
如果选择“不正常的行为” |
255 |
前景帧 |
如果选择“不正常的行为” |
10 |
方向 |
如果选择“错误方向”。只读。
单击配置。将打开“Direction Line”(方向线)子选项卡。 |
355 |
用于“Multi-Layer
Hybrid”(多层混合)背景模型的“环境”子选项卡选项
选项 |
说明 |
默认设置 |
计时 |
用于清除长期背景的时间(秒) |
仅适用于“双层动态”和“Multi-Layer
Hybrid”(多层混合)背景模型。 |
• 120
• 700
- 室内:
零售 |
用于清除短期背景的时间(秒) |
仅适用于“双层动态”背景模型。 |
• 5
• 1
- 室内:零售 |
将短期背景移动到长期背景的时间(秒) |
仅适用于“双层动态”和“Multi-Layer
Hybrid”(多层混合)背景模型。 |
• 60
• 600
- 室内:
零售 |
灵敏度
控制背景模型检测与预期背景值间偏差的灵敏程度。
如灵敏度较低,背景模型便会认为偏差是由于背景外观的自然变化造成的。
如灵敏度较高,背景模型便会认为偏差是由前景物体造成的。
“Multi-Layer Hybrid”(多层混合)背景模型共检查三种特征,分别是:亮度(从黑到白)、颜色(红、蓝、灰等)和纹理(亮度的局部形式)。
滑块控制着 0 到 1 之间的灵敏度。至少应选择三种特征中的一种。 |
亮度 |
检测灰度的变化(从黑到白)。一般情况下均应选择此选项,但应根据场景中不同时间的光线变化程度,确定适当的灵敏度。 |
True,中 |
热量 |
跨整个范围内的可能值对强度差异给予同等重视。 |
False |
颜色 |
此视频引擎检测的是色调和饱和度的变化。颜色受光线的影响并不大,不过,仅凭颜色无法分辨出背景中的所有物体。与亮度相比,颜色的分辨需要更长的
CPU 时间。 |
True,高 |
纹理 |
此视频引擎可检测局部亮度形式的变化,特别是新的边缘。纹理一般受光线的影响较小,但较平的物体可能纹理不足,难以从背景中分辨出来。与颜色相比,纹理的分辨需要更长的
CPU 时间。 |
False |
多尺度处理 |
选择此选项后,能够以多个空间分辨率监视变化。这样可以提高不同场景的准确性(特别是结合“纹理”特征后),但也会增加
CPU 的负载。 |
False |
调整
调整表示形式以显示变化所用的时间(秒) |
控制背景模型根据场景中的缓慢变化(如日落)作出调整的速度。如需检测场景中的缓慢变化,则设置为较大的值,如果场景中存在很多渐进的,但相对较快的光线变化,则设置为较小的值。 |
20
(1 至 500 秒) |
阴影去除 |
在遇到非常深暗的阴影时,高灵敏度级别设置很有帮助。
在遇到较淡的阴影时,低灵敏度级别设置很有帮助。
示例
0.1 = 较淡的阴影
1.0 = 非常深暗的阴影 |
0.5 |
“高级”子选项卡
“高级”子选项卡设置仅适用于专家。仅在分析引擎无法按预期方式运行的情况下才能更改值。有关使用说明,请参见表
。
“高级”子选项卡选项
选项 |
说明 |
默认设置 |
分析
FPS |
指示系统将分析的帧数。通常不应更改默认值。但是,为了节省
CPU,在很多情况下可以降低分析帧速。这可能会对算法性能产生负面影响。 |
8 |
捕获分辨率 |
显示录制视频时所采用的分辨率。可在“设备”设置中更改此分辨率。 |
320
x 240 |
分析分辨率 |
将“分析用的分辨率”和“采集的分辨率”设置为相同值可确保检测尽可能远的对象。但是,为了节省
CPU 资源,可以对发送的用于分析的视频进行缩减像素采样。缩减像素采样将降低 CPU 要求,但同时也会缩小视频分析的检测范围。 |
320
x 240 |
处理延迟 |
对于时空背景模型,跟踪器必须先运行几帧,创建一个缓冲区,然后才能跟踪实时图像。 |
0 |
逗留时间 |
显示之后 |
如物体的停留时间已达到
x 秒(默认值为 10 秒),则显示物体已经停留的秒数。 |
10 |
移动限制
(尺寸比例) |
定义物体可以移动,但仍被视作停留的移动幅度。
从“水平”和“垂直”两个方向,计算物体可以移动的尺寸比例。
示例:
在“Uncalibrated Camera Position”(未校准摄像头位置)中(请参见概述子选项卡),“水平 50”表示物体最多可在水平方向上移动
50%(高度和宽度)而不会被视为移动。“垂直”方向也是如此。
对于校准的“摄像头位置”(“成角度”、“垂直向下”),“水平”值设定的则是物体可在地平面上移动的高度比例。“垂直”方向被忽略。 |
水平
50 垂直 50 |
跟踪 |
每次重复的建议
总数 |
定义了允许算法对每帧执行的分析量。 |
400 |
每个物体的最多
建议 |
定义了允许算法对每个物体执行的分析量(如果存在的物体
不多)。 |
40 |
系统温度 |
定义了对于不会立即导致场景模型对现有证据作出响应的移动,系统对这类移动的灵敏度。 |
25 |
新物体的最小尺寸 |
|
3 |
物体外观 |
无 |
仅可用于二维快速物体跟踪。
不要使用物体外观。允许提高性能,但降低准确性。如果 CPU 负载过高或物体颜色相近,请选择“无”。 |
|
色块 |
存储物体特定位置的平均颜色值。 |
False |
颜色柱形图 |
存储像素颜色在物体中的大致分布。 |
True |
尺寸和距离 |
|
新物体最小尺寸(像素) |
|
3 |
隐藏物体最大跳跃距离(米) |
将“Overview
Camera”(全景摄像头)位置设置为“Angled”(成角度)时,默认值为 3.0 米。
将“Overview Camera”(全景摄像头)位置设置为“Overhead”(垂直向下)时,默认值为
0.75 米。 |
3.0 |
隐藏物体最长持续时间(秒) |
将“Overview
Camera”(全景摄像头)位置设置为“Angled”(成角度)时,默认值为 3 秒。
将“Overview Camera”(全景摄像头)位置设置为“Overhead”(垂直向下)时,默认值为
1 秒。 |
3.0 |
新物体最短移动距离(米) |
将“Overview
Camera”(全景摄像头)位置设置为“Angled”(成角度)时,默认值为 0.5 米。
将“Overview Camera”(全景摄像头)位置设置为“Overhead”(垂直向下)时,默认值为
0.2 米 |
0.5 |
新物体最短移动距离(像素) |
将“Overview
Camera”(全景摄像头)位置设置为“Angled”(成角度)时,默认值为 5 个像素。
将“Overview Camera”(全景摄像头)位置设置为“Overhead”(垂直向下)时,默认值为
5 个像素。 |
5 |
一般建议 |
添加物体 |
尝试向场景添加新物体。如未选择此选项,则不会跟踪任何
物体。
默认设置权重 (1.00) 表示此操作与其他操作相比可能为系统
所采用的可能性。 |
0.20 |
移除物体 |
移除现有物体。如未选择此选项,则无法移除物体。 |
0.20 |
交换两个物体的
位置 |
交换两个相邻物体的位置 |
0.5 |
交换两个物体的
深度 |
仅交换物体与摄像头间的距离 |
0.5 |
调整物体 |
更改物体位置,使之与数据更加匹配。 |
0.5 |
跟踪建议 |
色块 |
根据色块信息寻找新位置。 |
0.5 |
颜色柱形图 |
根据颜色柱形图信息寻找新位置。 |
0.5 |
轮廓 |
根据物体的轮廓寻找新位置。 |
0.5 |
稀疏特征 |
根据局部纹理点寻找新位置。 |
0.5 |
前景 |
寻找一个使物体与检测到的前景对齐的新位置。 |
0.5 |
运动动力学 |
根据在之前帧中的移动方式,随机寻找新位置。 |
1.0 |
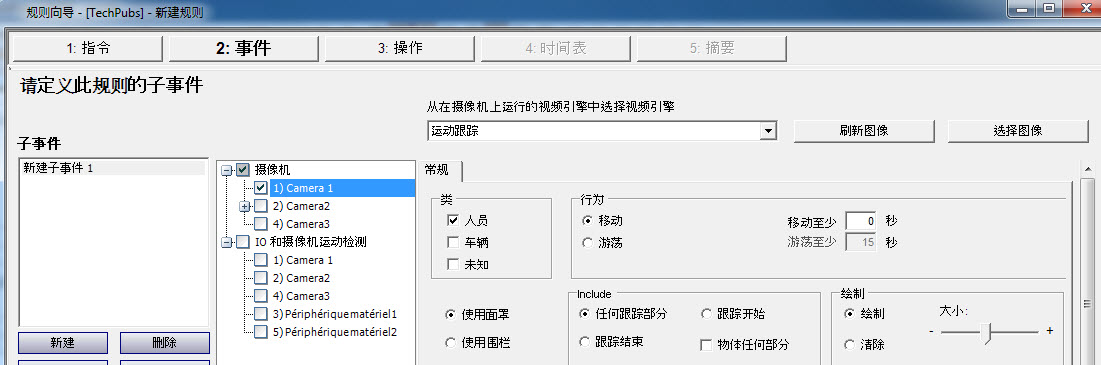
任务 5:创建使用 VE180 的规则
VE180
中触发规则的“事件”
配置使用 VE180 的规则:
1. 必须先配置
VE180,然后才能创建使用 VE180
的规则。
2. 从“服务器”菜单中,依次选择“配置”和“规则”。
3. 单击“新建”。此时将打开“规则向导”。阅读概述并单击“下一步”。
4. 选中摄像头名称旁边的复选框。如果是
PTZ 摄像头,请选中摄像头巡视位置复选框。
5. 从“选择在摄像头上运行的视频引擎”下拉列表中,选择“VE180”。
6. 对于数字围栏,选择“Use Fences”(使用虚拟围栏)选项:
a. 选择“任何的虚拟围栏”选项,然后用鼠标在图像上绘制一条线。绘线时自动显示的箭头定义了违规物体生成警报时必须经过的方向。
b. 选择“任何的虚拟围栏”选项后,单击箭头更改其属性。
• 红色箭头表示按箭头方向经过线的物体将生成警报。
• 绿色箭头表示按箭头方向经过线的物体不会生成警报。
• 可定义多条虚拟围栏线。
• 要删除线,应选择“Erase Line”(擦除线)选项,左键单击您想在图像中删除的线的端点。
7. 要指定警报区,应选择“Use Mask”(使用面罩)选项。
• 选择“擦除”选项可擦除红色面罩。
• 选择“绘制”选项可绘制红色面罩。
• “大小”滑块可调整笔粗细。
下列设置仅适用于警报区域:
• “任何的跟踪部分”表示物体位于红色警报区域中的任意位置即可触发警报。要对在警报区域中的任意位置移动的物体生成警报,请选择“任何跟踪部分”。
• “跟踪结尾部分”表示物体已在警报区域中停止。要对进入警报区域并在警报区域中停止的物体生成警报,请选择“跟踪结尾部分”。
• “跟踪开始部分”表示物体已开始在警报区域中移动。要对位于警报区域并已开始移动的物体生成警报,请选择“跟踪开始部分”。
• “任何对象部分”表示物体的任何部分位于红色警报区域中的任意位置即可触发警报。
8. 单击“下一步”以继续完成向导的下一步骤。请参见规则
- 使用规则向导部分以了解详情。