VE150 非常适用于室内和室外移动跟踪应用。此引擎可对人员和车辆之间的差异进行分类,并且可检测对象是停止移动、开始移动,还是仅仅移经场景。因此,可以围绕这些功能设计警报规则。
典型部署包括:
• 检测人员或车辆的商用建筑。
• 应检测进入警报区域或经过预定义周界的对象的军事基地;或
• 汽车经销商和建筑工地,其中,全职保安并非是下班后检测人群或车辆的经济有效的方法。
VE150 因室外环境变化生成的错误警报比正常移动检测算法要少得多。可使用不同的 VE150 操作模式,这些操作模式可用于室内人数统计和停留时间应用。
任务 1:配置 VE150
配置 VE150:
1. 在Symphony的“服务器”菜单中,选择“配置”。此时将打开“配置”对话框。此对话框用于配置当前选定服务器的设备。
2. 在左窗格中,单击“设备”。此时将打开“设备”对话框。
3. 单击要配置用于视频分析的摄像头,然后单击“编辑”。
4. 单击“分析引擎”选项卡并选择“VE150”。默认情况下,将选择“VE250”,此种情况下,您必须先取消选择“VE250”。
5. 单击“分析配置”选项卡(“分析配置”选项卡)。
VE150 的“分析配置”选项卡
1. 在“分析引擎”下拉列表中,选择“Intel_VE150”。
2. 单击“移动分析”子选项卡。此时将显示视频的当前图像。
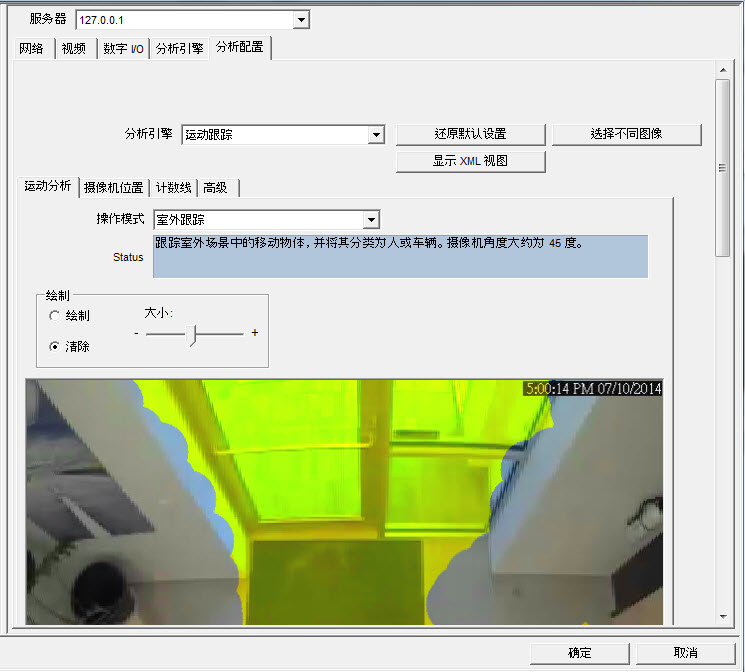
“移动分析”子选项卡
1. 从“操作模式”下拉列表中,选择一种模式。“状态”字段显示所选操作模式的说明。
• 室外跟踪
• 非头顶人群跟踪
• 头顶人群跟踪
• 头顶人群计数
• 错误方向检测
• 简单物块跟踪器
2. 您将在此图像中定义一个用于移动检测的区域。如果此图像不足以满足需求,请单击“选择不同图像”。此时将打开“选择图像”对话框。从“时间线”中选择一幅图像。
3. 使用显示的视频图像,定义应在其中检测移动对象的黄色区域(面罩)。(您是否不太确定此概念?请参见面罩:Symphony 跟踪物体所在的区域)。
• 选择“擦除”选项可擦除黄色面罩。
• 选择“绘制”选项可绘制黄色面罩。
• “大小”滑块可调整笔粗细。
“摄像头位置”子选项卡
1. 单击“摄像头位置”子选项卡。根据“移动分析”子选项卡中选择的“操作模式”,“摄像头位置”选项将有所不同。
|
操作模式:“室外跟踪”、“非垂直向下的人员移动跟踪”和“错误方向检测” |
|
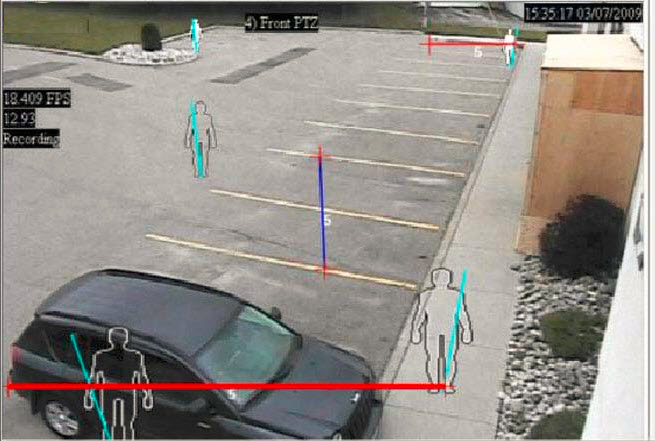
在采集的图像中指定摄像头相对于对象的位置:
更改 3 条直线,以使整个场景中参考人物尺寸能够准确显示。(要查看此概念,请参见透视图。) • 拖动线端点,调整线长短。 • 通过拖动线条中间来移动线。 • 这些线表示沿地面的距离。 • 提供的长度值仅用于理解每条直线与其他直线之间的关系(前景与广阔的距离相对应)。因此,测量单位互不相关。 • 要移动参考人物,请左键单击其图标的脚的位置,然后拖动。 • 要添加参考人物,请在图像中右键单击所需位置。 • 要删除参考人物,请左键单击其图标,然后按“删除”。
室外跟踪操作模式 |
|
操作模式:头顶人群跟踪 |
|
在采集的图像中指定摄像头相对于对象的位置:
• 您可以配置以青色突出显示的所有对象。 • 将中间方框的青色中点直接移到摄像头下面的位置。 • 使用角点将中间方框调整到普通人物大小。 • 调整外部方框的青色线,以使这些方框表示普通人物的大小。 • 如果摄像头放置在非常高的位置,并且直接指向下面的地板,请将所有三个方框设置为相同大小。
“垂直向下的人员移动跟踪”操作模式 |
|
操作模式:头顶人群计数 |
|
在采集的图像中指定摄像头相对于对象的位置:
• 您可以配置以青色突出显示的所有对象。 • 将中间方框的青色中点直接移到摄像头下面的位置。 • 使用角点将中间方框调整到普通人物大小。
“垂直向下的人数统计”操作模式 |
2. 单击“应用”保存设置。
1. 确保正确设置“摄像头位置”和“移动分析”面罩,然后单击“计数线”子选项卡。
2. 默认情况下,“绘制计数线”选项处于选中状态。
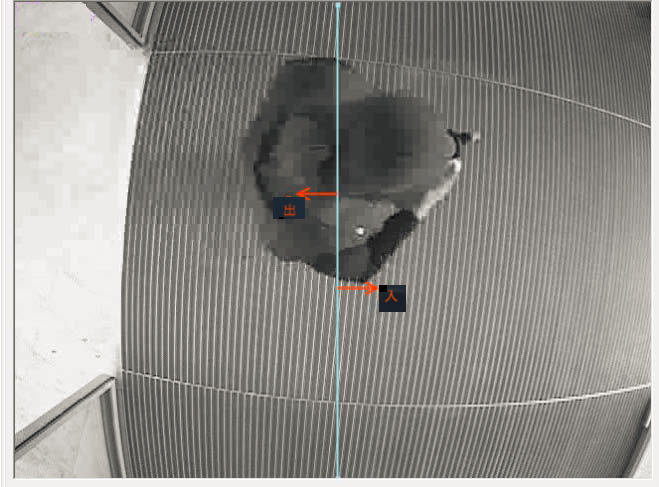
3. 左键单击图像,然后绘制一条直线,该直线将导致物品(人群或车辆)在经过所描绘的区域时对该物品进行计数。
• 当检测到“移入”描绘区域和“移出”描绘区域的位移时,该线在显示时使用箭头表示。
4. 单击“确定”保存设置,或者单击“高级”子选项卡进行其他设置。
|
重要信息:“高级”子选项卡设置仅适用于专家。仅在分析引擎无法按预期方式运行的情况下才能更改值。 |
1. 在“分析 FPS”字段中输入一个每秒帧数值。
• 此值指示系统将分析的帧数。通常不应更改默认值。但是,为了节省 CPU,在某些情况下可以降低分析帧速。这可能会对算法性能产生负面影响。
• 与“分析分辨率”一样,“分析 FPS”也可以设置为不同于“记录 FPS”的值。
2. 根据需要设置“分析用的分辨率”。
• 将“分析用的分辨率”和“采集的分辨率”设置为相同值可确保检测尽可能远的对象。但是,为了节省 CPU 资源,可以对发送的用于分析的视频进行缩减像素采样。缩减像素采样将降低 CPU 要求,但同时也会缩小视频分析的检测范围。
3. 从“背景模型”下拉列表中,选择最具摄像头录制环境代表性的模型(例如,高移动区域)。有关用法的完整说明,请参见“背景模型”用法。
|
重要信息:调整“背景模型”通常是减少错误警报的最佳方法。(它需要更多 CPU。) |
4. 根据选择的“操作模式”和“背景模型”显示各种选项和默认设置。选择选项之前,请从
根据选择的“背景模型”提供的“高级选项” 中的信息了解其用法。
任务 2:创建使用 VE150 的规则
配置使用 VE150 的规则:
1. 必须先配置 VE150,然后才能创建使用 VE150 的规则。
2. 从“服务器”菜单中,依次选择“配置”和“规则”。
3. 单击“新建”。此时将打开“规则向导”。阅读概述并单击“下一步”。
4. 选中摄像头名称旁边的复选框。如果是 PTZ 摄像头,请选中摄像头巡视位置复选框。
5. 从“选择在摄像头上运行的视频引擎”下拉列表中,选择“VE150”。
6. 对于假定选择了“室外跟踪”模式的数字围栏:
a. 单击“任何的虚拟围栏”或“删除虚拟围栏”以便定义和擦除数字围栏。箭头定义违规物体生成警报必须经过线时的方向。
b. 双击箭头以更改其属性。
• 红色箭头表示按此方向经过线的物体将生成警报。
• 绿色箭头表示按此方向经过线的物体将不会生成警报。
• 可定义多条虚拟围栏线。
|
重要信息:如果选择了“所有的虚拟围栏”,物体必须经过定义的所有虚拟围栏才能生成警报。 |
7. 对于“警报”区域,请标记“警报”区域:
• 选择“擦除”选项可擦除红色面罩。
• 选择“绘制”选项可绘制红色面罩。
• “大小”滑块可调整笔粗细。
8. 下列设置仅适用于警报区域:
• “任何的跟踪部分”表示物体位于红色警报区域中的任意位置即可触发警报。要对在警报区域中的任意位置移动的车辆生成警报,请选择“任何跟踪部分”。
• “跟踪结尾部分”表示物体已在警报区域中停止。要对进入警报区域并在警报区域中停止的车辆生成警报,请选择“跟踪结尾部分”。
• “跟踪开始部分”表示物体已开始在警报区域中移动。要对停放在警报区域并已开始移动的车辆生成警报,请选择“跟踪开始部分”。
9. 选中“类”复选框以筛选或检测特定类的物体。
10. 单击“下一步”以继续完成向导的下一步骤。请参见规则 - 使用规则向导部分以了解详情。
规则向导
|
注意:通常,VE150 可检测距离摄像头 100 英尺的人和距离摄像头 150 英尺的车辆(假定 4CIF 或 640x480 并具备充足的照明条件)。这些距离取决于使用的镜头和缩放系数。 |
• 确保采用正确的帧速,并确保系统提供了足够的 CPU 以便执行正常分析。
• 通过调整“摄像头位置”选项卡,验证透视图的设置是否正确。
• 如果树木或倒影造成有害的错误警报,请尝试采用动态背景模型(“环境”选项卡)。如果问题仍然存在,请联系 以便寻求支持。
|
摄像头设置: 完全垂直向下的摄像头配置,其中,计数线将为水平或垂直直线。应拉近摄像头镜头,以使人大约占据屏幕宽度/高度的 1/4 至 1/3,具体取决于计数线是水平还是垂直的。
1. 拖动计数线,使其覆盖人群将经过的所需区域。 • 橙色线表示计数线已启用(处于活动状态)。 • 绿色线表示计数线已禁用。 2. 确保稍微延长此条线的两端,以使其涵盖摄像头视图中可能显示部分人群的所有可能区域。
示例 - 计数线 |
|
人的尺寸: 1. 从“时间线”中选择一个人正经过所需计数线的适当帧。该引擎需要确定正好经过计数线的人的尺寸。 2. 将矩形移至人上方并调整其大小,使矩形的方框尺寸等于人的肩部尺寸。
如果您发现统计的人数过多,请尝试减少人的大小。或者,如果统计的人数不足,请尝试增大人的大小。 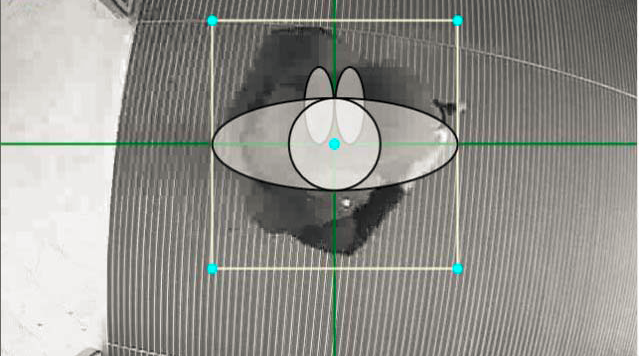
示例 - 人的大小 |
|
高级选项
分析 FPS:应至少为 8 FPS,但建议采用更高的 FPS (10)。人相对于图像整体尺寸的大小越大,所需 FPS 越高。
分析 FPS:默认情况下,对于常规大小的人,该选项应为 40x30(图像的 1/4 或更大值);然而,对于尺寸非常小的人,该选项应增大到 80x60,这是因为在该分辨率下进行缩减像素采样后,人将为 1-2 像素,此大小不足以满足处理需求。这将需要更多处理,因此,建议进一步放大图像。
背景模型:仅时空背景模型才支持移动估计值。请勿更改此选项。
阈值:应使用默认值 0.03。如果您发现即使没有人经过也会进行计数,请尝试增大
外观边缘化:默认情况下,应启用此选项。在具有较多阴影的环境中,您可以尝试禁用此选项(并调整阈值,例如,将其增大至 0.1)。
计数 下列参数可影响经过线的人数统计。这些参数通常适合采用默认设置,并且往往不需要手动干预。 • 仅考虑连续线段 • 多个宽度计数支持 • 最小物体宽度比 • 最大物体宽度比 • 物体经过线的持续时间 • 多个长度计数支持 • 最小物体长度比 • 最大物体长度比 |