对于仅检测移动而不需要检测物体类型或物体计数的室内环境,VE130 是理想之选。VE130 配置简单且准确性相对较高,因此成功取代了基于移动检测的摄像头。VE130 不会严格限制摄像头位置,这样,它在许多应用领域中都成为了理想的通用视频引擎。如果您需要物体计数或停留时间,请使用 VE150。对于室外环境,由于阴影或照明变化将导致 VE130 错误运行,因此也请使用 VE150。
任务 1:配置 VE130
配置 VE130:
1. 在 Symphony 客户端的“服务器”菜单中,选择“配置”。此时将打开“配置”对话框。此对话框用于配置当前选定服务器的设备。
2. 在左窗格中,单击“设备”。此时将打开“设备”对话框。
3. 单击要配置用于视频分析的摄像头,然后单击“编辑”。
4. 单击“分析引擎”选项卡并选择“VE130”。默认情况下,将选择“VE250”,此种情况下,您必须先取消选择“VE250”。
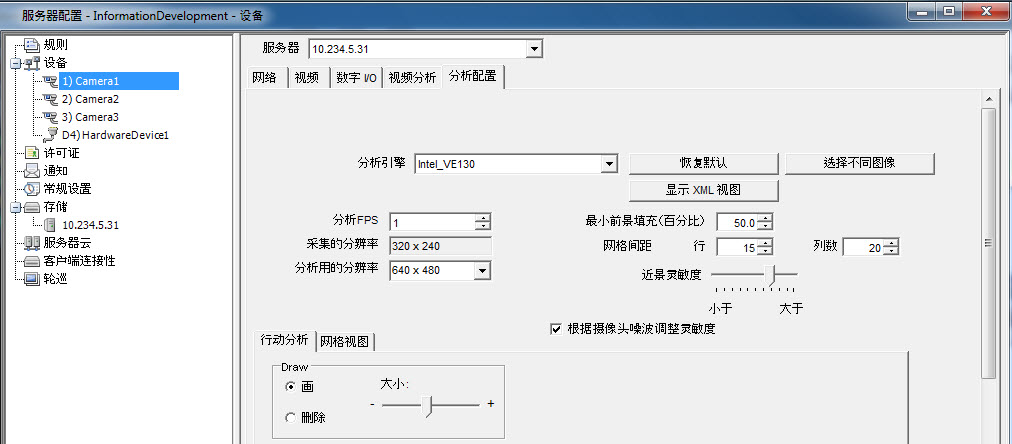
5. 单击“分析配置”选项卡。
“分析配置”选项卡
1. 从“分析引擎”下拉列表中,选择“Intel_VE130”。
2. 单击“移动分析”子选项卡。此时将显示视频的当前图像。
3. 您将在此图像中定义一个用于移动检测的区域。如果此图像不足以满足需求,请单击“选择不同图像”。此时将打开“选择图像”对话框。从“时间线”中选择一幅图像。
4. 使用显示的视频图像,定义应在其中检测移动对象的黄色区域(面罩)。(您是否不太确定此概念?请参见面罩:Symphony 跟踪物体所在的区域)。
• 选择“擦除”选项可擦除黄色面罩。
• 选择“绘制”选项可绘制黄色面罩。
• “大小”滑块可调整笔粗细。
5. (可选)您可以调整下列规格:
|
分析 FPS |
视频引擎分析帧所采用的帧速率。可将帧速率设置为低于录制帧速率的值。 |
|
捕获分辨率 |
显示录制视频时所采用的分辨率。可在“设备”设置中更改此分辨率。 |
|
分析分辨率 |
分析帧时所采用的分辨率。通常,为了节省 CPU,此分辨率低于“采集的分辨率”。 |
6. 单击“网格视图”选项卡,并根据需要调整下列规格。
|
最小前景填充(百分比) |
场景分为多个网格。该值指定在每个网格正方形中检测到活动之前此正方形必须更改的程度(采用百分比)。 |
|
网格间距(像素) |
将网格间距定义为“行”和“列”。 |
|
前景灵敏度 |
定义视频引擎对场景变化的灵敏度。视频引擎对变化越灵敏,最小前景填充在网格空间中检测到活动的可能性越大。 |
|
根据摄像头噪波调整灵敏度 |
|
7. 单击“确定”保存设置。
任务 2:创建使用 VE130 的规则
配置使用 VE130 的规则:
1. 从“服务器”菜单中,依次选择“配置”和“规则”。
2. 单击“新建”。此时将打开“规则向导”。阅读概述并单击“下一步”。
3. 选中摄像头名称旁边的复选框。如果是 PTZ 摄像头,请选中摄像头巡视位置复选框。
4. 从“选择在摄像头上运行的视频引擎”下拉列表中,选择“VE130 - 简单移动检测”。
5. 使用显示的视频图像,定义应在其中设置警报的红色区域(面罩)。(您是否不太确定此概念?请参见移动面罩和警报面罩)。
• 选择“擦除”选项可擦除红色面罩。
• 选择“绘制”选项可绘制红色面罩。
• “大小”滑块可调整笔粗细。
6. (可选)“子事件”- 请参见“规则”内容
7. 单击“下一步”以继续完成“规则向导”。根据规则 - 使用规则向导中的概念和说明设置规则。
|
重要信息:尽管 VE130 引擎比其他视频引擎需要更少的 CPU,但仍需要在服务器中解压缩视频才能进行分析。因此,节省的 CPU 非常有限。 |
如果阴影、雨或其他环境条件导致了过多的错误警报,请使用 VE150。