![]()
O VE150 é uma boa opção para aplicativos de rastreamento de movimento interno e externo. O mecanismo pode classificar a diferença entre pessoas e veículos, além de detectar se o objeto está parando, começando a se mover ou simplesmente se movendo na cena. Portanto, as regras de alarme podem ser criadas em torno desses recursos.
As implantações típicas incluem:
• Edifícios comerciais onde pessoas ou veículos devem ser detectados;
• Bases militares onde objetos que entram em uma zona de alarme ou cruzam um perímetro predefinido devem ser detectados; ou
• Revendedores de carros e sites de construção onde guardas de segurança em período integral não são uma abordagem econômica para detectar pessoas ou veículos após o horário de expediente.
O VE150 produzirá bem menos alarmes falsos causados por mudanças no ambiente externo do que os algoritmos normais de detecção de movimento. Diferentes modos de operação do VE150 estão disponíveis, podendo ser usados para aplicativos internos de contagem de pessoas e tempo de permanência.
Tarefa 1: Configurar o VE150
Para configurar o VE150:
1. No Symphony Client, no menu Servidor , selecione Configuração. A caixa de diálogo Configuração será aberta. Ela permite configurar dispositivos para o servidor selecionado.
2. No painel à esquerda, clique em Dispositivos. A caixa de diálogo Dispositivos será aberta.
3. Clique na câmera que você deseja configurar para usar com a análise de vídeo e clique em Edit.
4. Clique na guia Mecanismos de análise e selecione VE150. Por padrão, VE250 é selecionado e, nesse caso, primeiro será preciso desmarcá-lo.
5. Clique na guia Configuração da análise.
![]()
1. Na lista suspensa Mecanismos de análise , selecione Intel_VE150.
2. Clique na subguia Análise de movimento. Uma imagem atual do vídeo será exibida.
Subguia Motion Analysis
1. Na lista suspensa Modo de operação, selecione um modo. O campo Status exibe uma descrição do modo de operação selecionado.
• Outdoor Tracking
• Non-Overhead People Tracking
• Overhead People Tracking
• Overhead People Counting
• Wrong Direction Detection
• Simple Blob Tracker
2. Você definirá uma área na imagem para detecção de movimento. Se a imagem não for adequada, clique em Select different image. A caixa de diálogo Selecionar imagem será aberta. Selecione uma imagem em Timeline.
3. Usando a imagem do vídeo exibida, defina a área em amarelo (uma máscara) em que objetos em movimento devem ser detectados. (Não está certo sobre o conceito? Consulte Máscaras.)
• Selecione a opção Erase para apagar a máscara amarela.
• Selecione a opção Desenhar para desenhar a máscara amarela.
• O controle deslizante Size ajusta a espessura da caneta.
Subguia Camera Position
1. Clique na subguia Posição da câmera . Dependendo de qual Modo de operação tiver selecionado na subguia Análise de movimento, as opções em Posição da câmera irão variar.
Modos de operação: Rastreamento externo, Rastreamento de pessoas não aéreo e Detecção de direção errada |
Especifique a posição da câmera em relação aos objetos na imagem capturada:
Altere as três linhas de forma que os tamanhos de referência das pessoas apareçam precisamente em toda a cena. (Para rever o conceito, consulte Configurações comuns.) • Redimensione as linhas arrastando seus pontos de extremidade. • Mova a linha arrastando-a no centro. • As linhas representam a distância ao longo do chão. • O valor do comprimento é fornecido apenas para que se entenda como cada linha se relaciona com as outras (primeiro plano versus uma extensão na distância). Portanto, as unidades de medida são irrelevantes. • Para mover uma pessoa de referência, clique com o botão esquerdo do mouse na localização dos pés do ícone da pessoa e arraste. • Para adicionar uma pessoa de referência, clique com o botão direito do mouse no local desejado na imagem. • Para excluir uma pessoa de referência, clique com o botão esquerdo do mouse no ícone da pessoa e pressione Excluir. 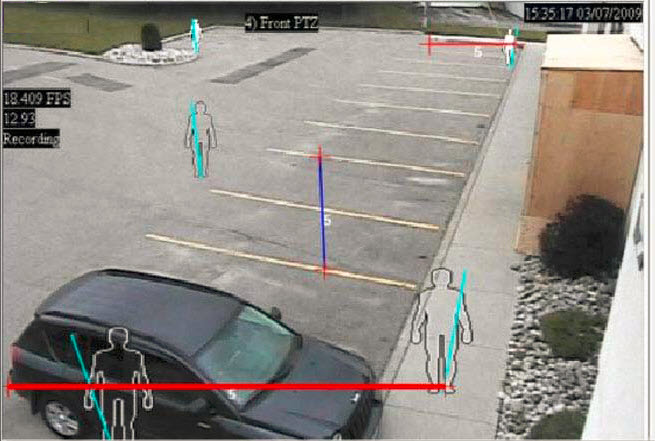
|
Modo de operação: Overhead People Tracking |
Especifique a posição da câmera em relação aos objetos na imagem capturada:
• É possível configurar todos os objetos destacados em ciano. • Mova o ponto do meio em ciano, do centro da caixa para um local diretamente abaixo da câmera. • Usando os pontos dos cantos, ajuste a caixa do centro ao tamanho de uma pessoa comum. • Ajuste as linhas em ciano das caixas externas de forma que as caixas representem o tamanho de uma pessoa comum. • Se a câmera for colocada em uma posição muito alta e apontada diretamente para baixo no chão, deixe as três caixas do mesmo tamanho.
|
Modo de operação: Overhead People Counting |
Especifique a posição da câmera em relação aos objetos na imagem capturada:
• É possível configurar todos os objetos destacados em ciano. • Mova o ponto do meio em ciano, do centro da caixa para um local diretamente abaixo da câmera. • Usando os pontos dos cantos, ajuste a caixa do centro ao tamanho de uma pessoa comum. 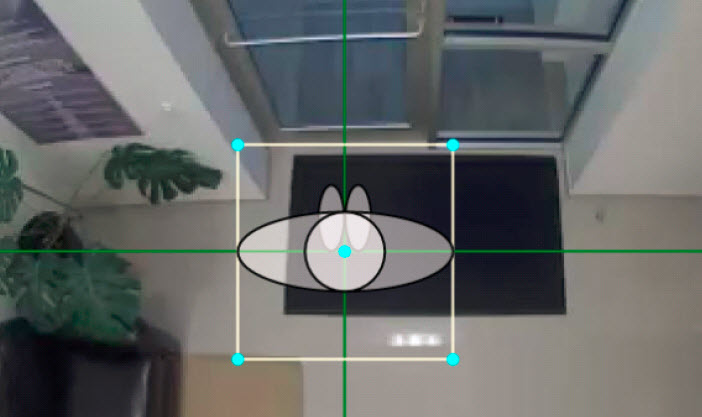
|
2. Clique em Apply para salvar as configurações.
1. Certifique-se de que a Posição da câmera e a máscara Análise de movimento estejam definidas adequadamente e clique na subguia Linha de contagem.
2. Por padrão, a opção Desenhar linha de contagem é selecionada.
3. Clique com o botão esquerdo do mouse na imagem e desenhe uma linha que fará com que os itens (pessoas ou carros) sejam contados ao passarem pela área delineada.
• A linha aparece com setas indicando quando o movimento é detectado como Entrada em uma área delineada e Saída da área delineada.
4. Clique em OK para salvar as configurações ou clique na subguia Avançado para outras configurações.
As configurações da subguia Advanced são apenas para especialistas. Os valores devem ser alterados apenas nos casos em que o mecanismo analítico não esteja funcionando como esperado. |
1. Insira um valor de quadros por segundo no campo FPS da análise.
• Esse valor indica quantos quadros serão analisados pelo sistema. Em geral, o valor padrão não deve ser alterado. No entanto, podem existir casos em que a velocidade de quadros da análise pode ser reduzida para conservar a CPU. Esse procedimento pode alterar de forma negativa o desempenho dos algoritmos.
• Assim como a opção Resolução da análise, a opção FPS da análise pode ser definida com um valor diferente da opção Gravar FPS.
2. Defina Resolução da análise conforme necessário.
• A configuração de Resolução da análise igual a Resolução da captura garante que os objetos serão detectados o mais distante possível. No entanto, para conservar recursos da CPU, é possível reduzir a resolução de vídeo enviada para análise. A redução da resolução reduzirá as exigências de CPU, mas também poderá reduzir o alcance da detecção da análise de vídeo.
3. Na lista suspensa Modelo de plano de fundo , selecione o modelo que representa melhor o ambiente que a câmera está gravando (por exemplo, uma área muito movimentada).
O ajuste da opção Modelo de plano de fundo geralmente é a melhor maneira de reduzir alarmes falsos. Ele requer mais CPU. |
Background Model |
Quando usar |
Static |
Use quando o plano de fundo for relativamente estático (nenhum movimento periódico no plano de fundo, como árvores balançando). Este é o modelo de plano de fundo mais rápido do Symphony . |
Dynamic |
Use quando existirem objetos em movimento periódico (como um ramo de árvore em movimento de vaivém com vento relativamente constante, ou causado pela montagem instável da câmera). Este modelo consegue lidar com planos de fundo estáticos e dinâmicos, mas utiliza mais potência da CPU que o modelo Estático e, portanto, não é recomendado para planos de fundo estáticos.
Importante: um ambiente pode parecer estático durante o dia, mas a chuva à noite criará um ambiente dinâmico. Portanto, você deve selecionar a configuração Dynamic. |
Dual Layer Dynamic |
Semelhante ao modelo de plano de fundo Dinâmico , mas consegue rastrear objetos que ficam imóveis por curtos períodos de tempo. Use em áreas internas quando desejar rastrear, por exemplo, pessoas que permanecem imóveis por 30 a 60 segundos. |
Spatio-Temporal |
Rastreia somente o movimento consistente, sendo capaz de reduzir sensivelmente os alarmes falsos causados por ramos de árvores e outros objetos no plano de fundo, que podem se mover aleatoriamente com o vento. Esta opção usará mais CPU e reduzirá o alcance da detecção da análise de vídeo. |
4. Várias opções e configurações padrão são exibidas com base no Modo de operação e no Modelo de plano de fundo selecionados. Antes de selecionar as opções, entenda seu uso:
Opção |
Descrição |
Configuração padrão |
Aprender comportamento normal |
Aprende a porcentagem de tempo que cada pixel está em movimento, podendo ignorá-lo posteriormente. É útil, por exemplo, ao rastrear barcos na água. |
False |
Opções |
||
Appearance |
Manual, Bright shiny, Grey matted |
Manual |
Lower bound |
Se a opção Manual for selecionada |
0,70 |
Upper bound |
Se a opção Manual for selecionada |
1,50 |
Mode |
Movimento coerente, Comportamento anormal, Direção errada |
Coherent Motion |
Appearance Marginalization |
Detecta somente padrões de movimento e não é influenciado pelas aparências. |
True |
Threshold |
Limite de detecção para o padrão Spatio-Temporal. |
0,03 |
Bg Frames |
Se a opção Comportamento anormal for selecionada |
255 |
Fg. Frames |
Se a opção Comportamento anormal for selecionada |
10 |
Direction |
Se a opção Wrong Direction for selecionada. Somente leitura. |
242 |
Contraste do primeiro plano |
Define o contraste mínimo necessário para que um objeto seja detectado como sendo de primeiro plano. Importante: se esta opção for definida com um valor alto, os objetos de cor semelhante à do plano de fundo não serão detectados como válidos para rastreamento. |
Low |
Reset background condition |
Se esta porcentagem do quadro for alterada, o plano de fundo será redefinido. |
100 |
Contraste do primeiro plano para determinação de câmera obstruída |
Define o contraste mínimo necessário entre o plano de fundo e o primeiro plano antes que a alteração seja considerada para um cenário obstruído pela câmera. |
Low |
Duração do reconhecimento do plano de fundo (segundos) |
Determina o tempo aproximado necessário para que um objeto de primeiro plano que se torna imóvel passe para o plano de fundo. Importante: se um objeto apresentar um movimento periódico em um período superior ao tempo especificado, ele será sempre considerado de primeiro plano (nunca passará para o plano de fundo). O plano de fundo é determinado com base nos últimos Segundos de atualização do plano de fundo do vídeo. O plano de fundo é atualizado o tempo todo, não só quando o mecanismo analítico é iniciado. |
15 |
Wait after large background change and before starting to track objects (seconds) |
Permite definir o tempo de espera após a redefinição do plano de fundo e antes do início do rastreamento de objetos. O ideal é que seja zero, mas se você estiver ciente de um problema de iluminação que pode provocar alarmes falsos se o início do rastreamento for imediato, defina esta opção com o número de segundos necessários para estabilização da luz. |
0 |
High contrast threshold |
O limite usado para determinar o quão distante uma observação pode estar do modelo de plano de fundo aprendido, antes que seja detectada como primeiro plano. Um valor baixo (por exemplo, 5) tornará o modelo de plano de fundo mais sensível a pequenas alterações nas intensidades do pixel.
Observação: o valor pode significar coisas diferentes para modelos de plano de fundo diferentes. |
25 |
Remove ghost pixels |
Os pixels que não sofrem alteração no valor por algum tempo não são considerados como primeiro plano. |
True |
Rastrear objetos que se movimentam lentamente/velocidade do objeto |
Rastreia um objeto que se movimenta muito lentamente no vídeo. Também pode ser um objeto vindo diretamente em direção à câmera ou se afastando diretamente dela, que parecerá estar se movendo lentamente.
Se a opção Rastrear objetos que se movimentam lentamente estiver desativada, esses objetos tenderão a se tornar parte do plano de fundo e, assim, não serão rastreados. Com a ativação dessa opção, esses objetos serão rastreados.
Importante: esta opção pode aumentar alguns alarmes falsos em situações nas quais um objeto permanece imóvel no vídeo durante muito tempo. |
False |
Shadow Sensitivity |
Controla o quão agressivamente as sombras (reduções na iluminação) são ignoradas ao rastrear objetos em movimento. Aumentar o controle deslizante (para a direita) permitirá que o mecanismo ignore corretamente mais áreas sombreadas.
Observação: isso também aumentará a possibilidade de uma pessoa que esteja usando roupas escuras sobre um plano de fundo claro ser classificada como uma sombra. |
Meio (desativado) |
Illumination Sensitivity |
Controla o quão agressivamente os aumentos na iluminação são ignorados. Aumentos na iluminação ocorrem devido a uma fonte de luz como o farol do carro ou quando um dia escuro se torna ensolarado. Aumentar o controle deslizante (para a direita) permitirá que o mecanismo ignore corretamente os aumentos na iluminação.
Observação: isso também aumentará a possibilidade de uma pessoa que esteja usando roupas claras sobre um plano de fundo escuro ser classificada como um aumento na iluminação. |
Meio (desativado) |
Cloud Check |
Tenta ignorar o movimento das nuvens. |
False |
Check for sudden background movement |
Tenta remover rastreamentos falsos devido a movimento repentino de objetos no plano de fundo, devido ao vento. Também eliminará rastreamentos falsos devido a movimentos repentinos da câmera. |
False |
Maximum distance in pixels |
Se a opção Check for sudden background movement estiver selecionada. Um movimento repentino é definido como o movimento de um objeto ou da câmera até esse número de pixels. |
5 (desativado) |
Time to clear long-term background (seconds) |
Disponível somente para o modelo de plano de fundo Codebook (Dual-Dynamic). |
False (desativado) |
Time to clear short-term background (seconds) |
Disponível somente para o modelo de plano de fundo Codebook (Dual-Dynamic). |
False (desativado) |
Time to move short-term background to long-term (seconds) |
Disponível somente para o modelo de plano de fundo Codebook (Dual-Dynamic). |
False (desativado) |
Initial background model learn time (seconds) |
Disponível somente para o modelo de plano de fundo Codebook (Dual-Dynamic). |
False (desativado) |
Classification |
||
Automatic classification |
Tenta classificar automaticamente objetos como carros, pessoas ou objetos desconhecidos. Inclui codificação por cores também. |
True |
Force all tracked objects to be classified as Vehicles |
Todos os objetos rastreados são classificados como veículos. |
False |
Force all tracked objects to be classified as People |
Todos os objetos rastreados são classificados como pessoas. |
False |
Force all tracked objects to be classified as Unknown |
Todos os objetos rastreados são classificados como desconhecidos. |
False |
Find Objects |
||
Use segmentação com base no contorno |
Melhor segmentação de objetos em movimento usando o contorno. |
True |
People-only segmentation |
Se a opção Use contour-based segmentation for selecionada. Tentará manter as pessoas que se encontram nas redondezas como objetos rastreados individualmente. Potencialmente, os veículos grandes podem ter a aparência de vários objetos menores. |
False |
Merge objects closer than (meters) |
Os objetos detectados que estiverem separados uns dos outros pela distância especificada serão mesclados formando um só objeto. |
2,5 |
Smallest object size (pixels) |
Objetos com largura inferior à especificada na opção Menor tamanho de objeto serão ignorados pelo mecanismo. |
2 |
Don’t track objects larger than (% of screen) |
Se um objeto detectado tiver uma largura ou altura superior à porcentagem especificada da largura ou altura da imagem respectivamente, ele será ignorado. |
90 |
Line People Counting |
||
Consider only contiguous segments |
Ao executar a contagem de linhas, procura segmentos contínuos. Não tenta acumular todos os pixels de cada direção. |
False (desativado) |
Min Object Width Ratio |
A proporção da largura do objeto considerada como a largura mínima da pessoa (0,33 por padrão). Por exemplo, se a largura do objeto for de 9 pixels e menos de 3 pixels forem contados em uma direção ao cruzar a linha, ele não será contado como um objeto. |
0,33 (desativado) |
Max Object Width Ratio |
A proporção da largura do objeto considerada como a largura máxima da pessoa (1,88 por padrão). É considerada somente quando a opção Suporte de contagem múltipla na largura está ativada. Se forem contados mais pixels, uma nova pessoa será considerada. Por exemplo, se a largura do objeto for de 9 pixels e mais de 9*1,88=16,92 pixels forem contados em uma direção ao cruzar a linha, duas pessoas serão contadas. |
1,85 (desativado) |
Multiple counting support in width (side-by-side) |
Considera casos em que pode haver mais de uma pessoa cruzando a linha ao mesmo tempo, lado a lado. |
True (desativado) |
Object Line Crossing Duration (seconds) |
O tempo necessário para que uma pessoa cruze a linha. |
1,00 (desativado) |
Min Object Length Ratio |
A proporção do tempo (em relação ao tempo que o objeto leva para cruzar a linha) necessário para detectar um objeto. Por exemplo, considerando-se uma velocidade de análise de 10 FPS, é necessário que seja detectado movimento suficiente em pelo menos dois quadros consecutivos para contar uma pessoa (bem como em uma largura de pelo menos 3 pixels). |
0,30 (desativado) |
Max Object Length Ratio |
A proporção do tempo (em relação ao tempo que o objeto leva para cruzar a linha) necessário para considerar que um novo objeto está vindo atrás sem qualquer lacuna. Uma proporção padrão de 3 é considerada para que as pessoas que estejam caminhando com carrinhos de bebês ou de compras não sejam contadas duas vezes. Se o ambiente não permitir isso, reduza a proporção, por exemplo, para 2,2. |
3,00 (desativado) |
Multiple counting support in length |
Considera casos em que pode haver mais de uma pessoa cruzando a linha, uma de costas para a outra, sem criar uma lacuna. |
True (desativado) |
Track Objects |
||
Make all objects foreground |
Todos os objetos detectados se tornarão objetos de primeiro plano e serão exibidos. |
False |
Don’t merge overlapping tracks |
Quando os rastreamentos de dois objetos se encontrarem, eles não serão mesclados em um único objeto. |
True |
Foreground sensitivity |
Ajusta a sensibilidade do mecanismo ao rastreamento de objetos e pode ser usado para reduzir rastreamentos falsos de árvores se movendo com o vento, ou aumentar a probabilidade de rastrear um objeto pouco visível (como pessoas parcialmente obstruídas por veículos em um estacionamento). |
Meio |
Specify the minimum distance an object must travel to become a tracked object |
Tentativa de detectar apenas rastreamentos de um determinado comprimento. |
False |
Deslocamento mínimo (metros) |
|
1,0 |
Reduce false tracks from snow |
Tenta remover rastreamentos criados pela neve. |
True |
Track small objects |
Objetos com menos de 5/16 metros não serão excluídos como neve. |
False |
Tarefa 2: Criar uma regra usando o VE150
Para configurar uma regra usando o VE150:
1. É preciso configurar o VE150 antes de criar uma regra que utilize-o.
2. No menu Servidor , selecione Configuração e Regras.
3. Clique em Nova. O Assistente de regras será aberto. Leia a visão geral e clique em Avançar.
4. Marque a caixa de seleção ao lado do nome da câmera. Se for uma câmera PTZ, marque a caixa de seleção da posição da ronda da câmera.
5. Na lista suspensa Selecionar dispositivo de vídeo para as em execução na câmera , selecione VE150.
6. Para obter uma cerca digital, considerando-se que o modo Outdoor Tracking tenha sido selecionado:
a. Clique em Qualquer cerca ou Excluir cerca para desenhar e apagar cercas digitais. As setas definem em que direção o objeto transgressor deve passar pela(s) linha(s) para causar um alarme.
b. Clique duas vezes nas setas para alterar suas propriedades.
• Vermelho indica que um objeto que cruzar a linha nessa direção causará um alarme.
• A seta verde indica que o objeto que cruzar a linha nessa direção não causará um alarme.
• Várias linhas de cerca podem ser desenhadas.
Se a opção Todas as cercas tiver sido selecionada, o objeto deverá passar por todas as cercas desenhadas para provocar o alarme. |
7. Para a zona Alarme , marque a zona Alarme:
• Selecione a opção Erase para apagar a máscara vermelha.
• Selecione a opção Desenhar para desenhar a máscara vermelha.
• O controle deslizante Size ajusta a espessura da caneta.
8. As seguintes configurações se aplicam apenas às zonas de alarme:
• Qualquer parte do rastreamento indica que o objeto pode estar em qualquer parte da zona de alarme em vermelho para acionar um alarme. Para um alarme sobre veículos que se movimentam em qualquer parte da zona de alarme, selecione Any part of track.
• Fim do rastreamento indica que o objeto parou na zona de alarme. Para um alarme sobre veículos que entram e param na zona de alarme, selecione End of track.
• Início do rastreamento indica que o objeto começou a se movimentar na zona de alarme. Para um alarme sobre veículos que estavam estacionados na zona de alarme e começaram a se movimentar, selecione Beginning of track.
9. Marque as caixas de seleção Class para filtrar ou detectar classes de objetos específicas.
10. Clique em Avançar para prosseguir para a próxima etapa do assistente.
• Certifique-se de que a velocidade de quadros correta está sendo usada e que há CPU suficiente disponível no sistema para executar a análise adequada.
• Verifique se a perspectiva foi definida corretamente ajustando a guia Camera Position.
• Se falsos alarmes incômodos ocorrerem devido a árvores ou reflexos, experimente o modelo de plano de fundo Dinâmico (guia Ambiente ). Se os problemas persistirem, entre em contato com a Aimetis para obter suporte.