Le moteur VE150 constitue un bon choix pour effectuer des suivis de mouvement dans des environnements intérieurs et extérieurs. Le moteur est à même de distinguer les personnes des véhicules et de détecter si l’objet s’arrête, s’il démarre ou s’il se déplace simplement dans la scène. Vous pouvez donc créer des règles d’alarme en vous basant sur ces fonctionnalités.
Les déploiements classiques incluent :
• les bâtiments commerciaux où les personnes et les véhicules doivent être détectés ;
• les bases militaires, où les objets qui entrent dans une zone d’alarme ou qui traversent un périmètre prédéfini doivent être détectés ;
• les concessionnaires d’automobiles et chantiers de construction, où il n’est pas rentable d’engager des agents de sécurité pour détecter les personnes et les véhicules après les heures de travail.
Par rapport aux algorithmes standard de détection de mouvement, le moteur VE150 génère beaucoup moins de fausses alertes dans un environnement extérieur changeant. Le moteur VE150 propose différents modes d'opération, que vous pouvez utiliser pour des applications intérieures de comptage de personnes et de calcul de temps d’immobilisation.
Tâche 1 : Configuration du moteur VE150
Pour configurer le moteur VE150 :
1. Dans le menu Serveur du client Symphony, sélectionnez Configuration. La boîte de dialogueConfiguration s'ouvre. Elle vous permet de configurer les équipements du serveur actuellement sélectionné.
2. Dans le volet gauche, cliquez sur Équipements. La boîte de dialogue Équipements s'affiche.
3. Cliquez sur la caméra que vous souhaitez configurer pour une utilisation avec des analyses vidéo, puis cliquez sur Modifier.
4. Cliquez sur l’onglet Moteurs d’analyse, puis sélectionnez VE150. Par défaut, VE250 est sélectionné. Vous devez donc désélectionner cette valeur.
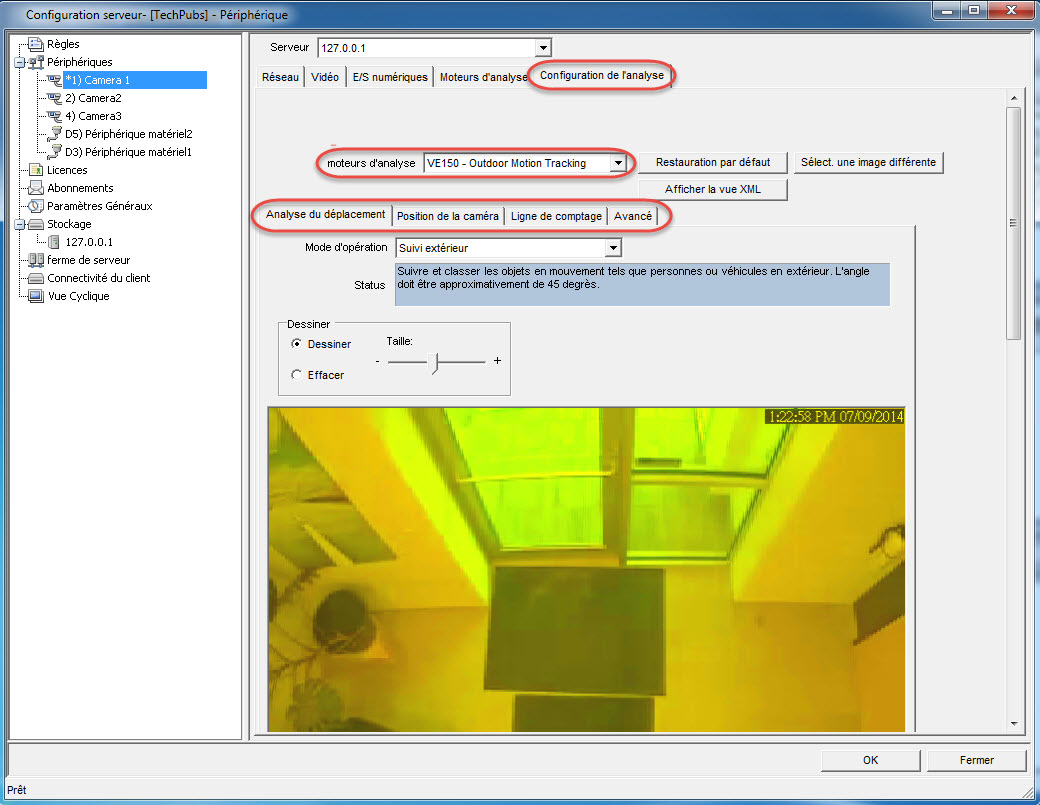
5. Cliquez sur l'onglet Configuration de l'analyse.
Onglet Configuration de l'analyse
1. Dans la liste déroulante Moteurs d’analyse, sélectionnez Intel_VE150.
2. Cliquez sur le sous-onglet Analyse du déplacement. Une image de la vidéo s'affiche.
Sous-onglet Analyse du déplacement
1. Dans la liste déroulante Mode d'opération, sélectionnez un mode. Le champ État affiche une description du mode d'opération sélectionné.
• Suivi extérieur
• Suivi de personnes avec caméra placée à 45 degrés
• suivi de personnes à la verticale
• Comptage de personnes en vue de dessus
• Détection de mauvaise direction
• Tracker de goutte simple
2. Vous allez définir une zone de l'image, dédiée à la détection de mouvement. Si l'image n'est pas appropriée, cliquez sur Sélectionner une image différente. La boîte de dialogue Sélectionner une image s'ouvre. Sélectionnez une image dans la barre de temps.
3. À l’aide de l’image affichée dans la vidéo, définissez la zone en jaune (le masque) où les objets en mouvement doivent être détectés. (Vous voulez en savoir plus sur ce concept ? Consultez la section Masques.)
• Sélectionnez l’option Effacer pour effacer le masque jaune.
• Sélectionnez l’option Dessiner pour dessiner le masque jaune.
• Le curseur Taille permet de régler l'épaisseur du tracé du stylo.
Sous-onglet Position de la caméra
1. Cliquez sur le sous-onglet Position de la caméra. Selon le Mode d'opération sélectionné dans le sous-onglet Analyse du déplacement, les options disponibles dans Position de la caméra varient.
Modes d'opération : Suivi extérieur, Suivi de personnes avec caméra placée à 45 degrés et Détection de mauvaise direction |
Indiquez la position de la caméra par rapport aux objets dans l'image capturée :
Modifiez les 3 lignes afin que les tailles des personnes de référence apparaissent correctement partout dans la scène. (Pour plus d'informations sur ce concept, consultez la section Perspective.) • Redimensionnez les lignes en faisant glisser leurs points d’extrémité. • Déplacez la ligne en la faisant glisser au centre. • Les lignes représentent la distance le long du sol. • Valeur de longueur fournie uniquement pour comprendre la relation de chaque ligne avec les autres lignes (premier plan et extension à une certaine distance). Les unités de mesure ne sont donc pas pertinentes. • Pour déplacer une personne de référence, cliquez sur les pieds de la personne (icône) et faites-la glisser. • Pour ajouter une personne de référence, cliquez à l'emplacement souhaité dans l'image. • Pour supprimer une personne de référence, cliquez sur l'icône de la personne et appuyez sur Supprimer. 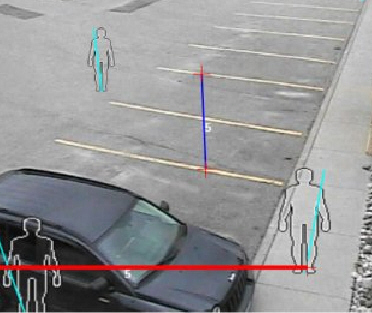
|
Mode d'opération : suivi de personnes à la verticale |
Indiquez la position de la caméra par rapport aux objets dans l'image capturée :
• Vous pouvez configurer tous les objets mis en surbrillance en cyan. • Déplacez le point cyan au milieu de la case centrale vers un emplacement situé directement sous la caméra. • À l'aide des points d'angle, ajustez la case centrale à la taille d'une personne moyenne. • Ajustez les lignes de couleur cyan des cases extérieures afin que ces cases représentent la taille d’une personne moyenne. • Si la caméra est placée très haut et qu’elle pointe directement vers le sol, les trois cases doivent avoir la même taille.
|
Mode d'opération : Comptage de personnes en vue de dessus |
Indiquez la position de la caméra par rapport aux objets dans l'image capturée :
• Vous pouvez configurer tous les objets mis en surbrillance en cyan. • Déplacez le point cyan au milieu de la case centrale vers un emplacement situé directement sous la caméra. • À l'aide des points d'angle, ajustez la case centrale à la taille d'une personne moyenne.
|
2. Cliquez sur Appliquer pour enregistrer les paramètres.
1. Vérifiez que les masques Position de la caméra et Analyse du déplacement sont définis correctement, puis cliquez sur le sous-onglet Ligne de comptage.
2. Par défaut, l'option Dessiner une ligne de comptageest sélectionnée.
3. Cliquez sur l’image et tracez une ligne pour que les éléments (personnes ou voitures) soient comptés lorsqu’ils passent dans la zone délimitée.
• La ligne s’affiche avec des flèches indiquant lorsque le mouvement est détecté À l'intérieur ou À l'extérieur de la zone délimitée.
4. Cliquez sur OK pour enregistrer les paramètres ou sur l'onglet Avancé pour afficher des paramètres supplémentaires.
Les paramètres du sous-onglet Avancé sont uniquement destinés aux experts. Vous ne devez modifier les valeurs que lorsque le moteur d’analyse ne fonctionne pas comme prévu. |
1. Saisissez un nombre d'images par seconde dans le champ Analyses FPS.
• Cette valeur indique le nombre d’images qui seront analysées par le système. En général, la valeur par défaut ne doit pas être modifiée. Toutefois, dans de nombreux cas, le nombre d’images par seconde d’une analyse peut être réduit pour préserver les ressources de l'unité centrale. Cette action peut avoir un impact négatif sur les performances des algorithmes.
• Comme le paramètre Résolution d'analyse, le paramètre Analyses FPS peut être défini sur une valeur autre que celle du paramètre Enregistrement FPS.
2. Définissez le paramètre Résolution d'analyse selon les besoins.
• Attribuer à Résolution d’analyse la même valeur que Résolution de capture garantit que les objets sont détectés aussi loin que possible. Cependant, afin de préserver les ressources de l’unité centrale, il est possible de sous-échantillonner la vidéo envoyée à des fins d'analyse. Le sous-échantillonnage permet de réduire les exigences en matière d’unité centrale, mais peut également réduire la portée de détection de l’analyse vidéo.
3. Dans la liste déroulante Modèle d'arrière-plan, sélectionnez le modèle qui représente le mieux l’environnement enregistré par la caméra (par exemple, une zone où les mouvements sont nombreux).
En général, la meilleure façon de réduire les fausses alarmes est d’ajuster le Modèle d'arrière-plan. (Cela nécessite un temps de traitement supplémentaire.) |
Modèle d'arrière-plan |
Quand l'utiliser |
Statique |
Lorsque l’arrière-plan est relativement statique (aucun mouvement périodique tel que des arbres dans le vent). Il s'agit du modèle d'arrière-plan Symphony le plus rapide. |
Dynamique |
Lorsque des objets ont un mouvement périodique (comme une branche d’arbre balancée par un vent relativement constant ou un mouvement créé par le montage instable de la caméra). Ce modèle d’arrière-plan convient aussi bien à un arrière-plan statique que dynamique, mais il mobilise davantage les ressources de l'unité centrale que le modèle Statique et n'est donc pas recommandé pour les arrière-plans statiques.
Important : un environnement peut sembler statique pendant la journée, mais devenir dynamique par temps de pluie la nuit. Par conséquent, vous devez sélectionner le paramètre Dynamique. |
Dynamique double couche |
Ce paramètre ressemble au modèle d’arrière-plan Dynamique , mais permet le suivi des objets qui sont statiques pendant de courtes périodes. Utilisez cette option dans les zones extérieures où vous souhaitez, par exemple, suivre des personnes qui restent immobiles pendant 30 à 60 secondes. |
Spatio-temporel |
Permet uniquement le suivi des mouvements réguliers. Il peut donc réduire de manière significative les fausses alarmes occasionnées par les branches d’arbre et autres objets de l’arrière-plan que le vent fait bouger de façon aléatoire. Ce modèle utilise davantage de ressources d’unité centrale et réduit la portée de détection des analyses vidéo. |
4. Les options et paramètres par défaut affichés varient en fonction du Mode d'opération et du Modèle d'arrière-plan sélectionné. Avant de sélectionner des options, apprenez à les utiliser :
Option |
Description |
Paramètre par défaut |
Apprendre le comportement normal |
Permet de connaître le pourcentage du temps pendant lequel chaque pixel est en mouvement et peut donc être ignoré. Cette option est, par exemple, utile pour suivre des bateaux sur l’eau. |
Faux |
Options |
||
Apparence |
Manuel, brillant, gris emmêlé |
Manuel |
Limite basse |
Si l'opération Manuel est sélectionnée |
0,70 |
Limite haute |
Si l'opération Manuel est sélectionnée |
1,50 |
Mode |
Mouvement cohérent, comportement anormal, mauvaise direction |
Mouvement cohérent |
Marginalisation de l’apparence |
Ne détecte que les types de mouvement, sans prise en compte des apparences. |
Vrai |
Seuil |
Seuil de détection du modèle spatio-temporel |
0,03 |
Images d'arrière-plan |
Si l’option Comportement anormal est sélectionnée |
255 |
Images au premier plan |
Si l’option Comportement anormal est sélectionnée |
10 |
Direction |
Si l’option Mauvaise direction est sélectionnée Lecture seule |
242 |
Contraste du premier plan |
Définit le contraste minimum nécessaire pour qu’un objet soit détecté en tant qu’objet du premier plan. Important : si vous configurez une valeur élevée, les objets ayant une couleur similaire à celle de l’arrière-plan ne sont pas détectés en tant qu'objets devant être suivis. |
Basse |
Réinitialiser les conditions d’arrière-plan |
Si ce pourcentage de l’image est modifié, l’arrière-plan est réinitialisé. |
100 |
Le contraste au premier plan détermine si le champ de vision de la caméra est obstrué. |
Définit le niveau de contraste minimal qui doit exister entre l’arrière-plan et le premier plan pour que le changement soit pris en compte comme une obstruction du champ de vision de la caméra. |
Basse |
Durée d’apprentissage du fond de l’image (en secondes) |
Permet de déterminer le temps qu’il faut approximativement à un objet du premier plan devenant statique pour fusionner avec l’arrière-plan. Important : si un objet effectue des mouvements périodiques pendant une période plus longue que celle spécifiée, il est toujours considéré appartenant au premier plan (donc jamais fusionné avec l’arrière-plan). L'arrière-plan est déterminé en fonction de la dernière mise à jour de l'arrière-plan (en secondes) de la vidéo. L’arrière-plan est mis à jour en permanence et pas uniquement lorsque le moteur d’analyse se lance. |
15 |
Attendre que l’arrière-plan change largement avant de lancer un suivi d’objet (secondes) |
Permet de définir le temps d’attente nécessaire avant d’effectuer un suivi des objets lorsque l’arrière-plan a été réinitialisé. Idéalement, cette valeur est de zéro. Mais si vous remarquez un problème d’éclairage qui déclenche de fausses alarmes en raison d’un démarrage immédiat du suivi, saisissez le nombre de secondes nécessaires à la stabilisation de l’éclairage. |
0 |
Seuil contraste élevé |
Seuil permettant de déterminer à quel point un objet observé peut se distinguer du modèle d’arrière-plan existant avant d’être détecté comme un objet du premier plan. Si la valeur est basse (par exemple, 5), le modèle d’arrière-plan est plus sensible aux petites modifications d’intensité des pixels.
Remarque : selon le modèle d’arrière-plan, la valeur peut avoir différentes significations. |
25 |
Supprimer les pixels fantômes |
Les pixels ne changeant pas de valeur pendant un certain temps ne sont pas considérés comme des pixels du premier plan. |
Vrai |
Suivre les petits objets en déplacement/vitesse de l’objet |
Permet de suivre un objet se déplaçant très lentement dans la vidéo. Il peut également s’agir d’un objet avançant tout droit vers la caméra ou s’en éloignant, qui semblera se déplacer lentement.
Si l'option Suivre les petits objets en déplacement est désactivée, les objets en question tendent à s’intégrer à l’arrière-plan et ne sont donc pas suivis. Si vous activez cette option, ces objets seront suivis.
Important : cette option peut augmenter le déclenchement de certaines fausses alarmes dans les cas où un objet reste longtemps immobile dans la vidéo. |
Faux |
Sensibilité de l’ombre |
Contrôle dans quelle mesure les ombres (diminution de l’éclairage) sont ignorées lors du suivi des objets en mouvement. Le déplacement du curseur vers la droite permet au moteur d’ignorer à juste titre davantage de zones d’ombre.
Remarque : cela accroît également la probabilité qu’une personne portant des vêtements sombres sur un fond clair soit considérée comme une ombre. |
Milieu (désactivé) |
Sensibilité illumination |
Contrôle dans quelle mesure les augmentations de l’éclairage sont ignorées. L’éclairage augmente sous l’effet d’une source de lumière, par exemple avec les phares d’une voiture ou lorsque le temps se découvre. Le déplacement du curseur vers la droite permet au moteur d’ignorer à juste titre les augmentations de l'éclairage.
Remarque : cela accroît également la probabilité qu’une personne portant des vêtements clairs sur un fond sombre soit considérée comme une augmentation de l'éclairage. |
Milieu (désactivé) |
Vérification nuage |
Tente d’ignorer le mouvement des nuages. |
Faux |
Vérifier les changements soudains de l’arrière-plan |
Tente de supprimer les fausses alertes déclenchées par le mouvement soudain d’objets à l’arrière-plan qui sont déplacés par le vent. Cette option permet également d’éliminer les fausses alertes liées aux mouvements soudains de la caméra. |
Faux |
Distance maximale en pixels |
Si l'option Vérifier les changements soudains de l’arrière-plan est sélectionnée. Un changement soudain est défini comme le mouvement d’un objet ou d’une caméra jusqu’au nombre de pixels indiqué. |
5 (désactivé) |
Temps pour effacer l’arrière-plan à long terme (secondes) |
Uniquement disponible pour un modèle d’arrière-plan à liste de codage (double couche dynamique). |
Faux (désactivé) |
Temps pour supprimer l’arrière-plan à court terme (secondes) |
Uniquement disponible pour un modèle d’arrière-plan à liste de codage (double couche dynamique). |
Faux (désactivé) |
Temps de déplacement de l’arrière-plan à court terme à l’arrière-plan à long terme (secondes) |
Uniquement disponible pour un modèle d’arrière-plan à liste de codage (double couche dynamique). |
Faux (désactivé) |
Temps d’apprentissage de modèle d’arrière-plan (secondes) |
Uniquement disponible pour un modèle d’arrière-plan à liste de codage (double couche dynamique). |
Faux (désactivé) |
Classification |
||
Classification automatique |
Permet de classifier automatiquement des objets tels que des voitures, des personnes ou des objets inconnus. Inclut également des codes de couleur. |
Vrai |
Force la classification de tous les objets suivis comme véhicules |
Tous les objets suivis sont classés comme véhicules. |
Faux |
Force la classification de tous les objets suivis comme personnes |
Tous les objets suivis sont classés comme personnes. |
Faux |
Force la classification de tous les objets suivis comme objets inconnus |
Tous les objets suivis sont classés comme inconnus. |
Faux |
Trouver les objets |
||
Utiliser la segmentation basée sur le contour |
Meilleure segmentation des objets en déplacement grâce au contour. |
Vrai |
Segmentation sur les personnes uniquement |
Si l'option Utiliser la segmentation basée sur le contour est sélectionnée. Tente de considérer les personnes à proximité comme des objets suivis individuellement. Il est possible que les véhicules de grande taille soient considérés comme plusieurs petits objets. |
Faux |
Fusionner les objets à moins de (mètres) |
Les objets détectés qui se trouvent à une certaine distance les uns par rapport aux autres sont fusionnés en un seul objet. |
2,5 |
Taille des plus petits objets (pixels) |
Les objets d'une largeur inférieure à la Taille des plus petits objets sont ignorés par le moteur. |
2 |
Ne pas suivre les objets plus larges que (% de l’écran) |
Si la largeur ou la hauteur d’un objet détecté dépasse le pourcentage de largeur ou de hauteur d’image spécifié, l’objet concerné est ignoré. |
90 |
Comptage des personnes sur une ligne |
||
Considérer uniquement les segments contigus |
Lors du comptage de lignes, cette option permet de rechercher les segments continus. Elle ne tente pas d’accumuler tous les pixels pour chaque direction. |
Faux (désactivé) |
Rapport de largeur min. d’objet |
Rapport de la largeur d’objet considérée comme la largeur minimale de la personne (par défaut, 0,33). Par exemple, si l'objet présente une largeur de 9 pixels et que moins de 3 pixels sont comptabilisés dans une direction lorsqu'il traverse la ligne, il n’est pas considéré comme un objet. |
0,33 (désactivé) |
Rapport de largeur max. d’objet |
Rapport de la largeur d’objet considérée comme la largeur maximale de la personne (par défaut, 1,88). Ce rapport est pris en compte uniquement si l'option Prise en charge de comptages multiples pour la largeur est activée. Si les pixels comptés sont plus nombreux, une nouvelle personne est prise en compte. Par exemple, si l'objet présente une largeur de 9 pixels et que plus de 16,92 pixels (soit 9*1,88) sont comptabilisés dans une direction lorsqu'il traverse la ligne, deux personnes sont comptées. |
1,85 (désactivé) |
Prise en charge de comptages multiples pour la largeur (côte à côte) |
Prend en compte les cas où plusieurs personnes peuvent traverser simultanément la ligne en étant côte à côte. |
Vrai (désactivé) |
Durée pendant laquelle l’objet traverse la ligne (en secondes) |
Temps qu’une personne met pour traverser la ligne. |
1,00 (désactivé) |
Rapport de longueur min. d’objet |
Durée nécessaire pour détecter un objet (par rapport au temps qu'il met pour traverser la ligne). Par exemple, si l'échantillonnage est de 10 IPS, un nombre de mouvements suffisant doit être détecté dans au moins deux images consécutives (et sur une largeur minimale de 3 pixels) pour qu’une personne soit comptée. |
0,30 (désactivé) |
Rapport de longueur max. d’objet |
Durée (par rapport au temps mis par l’objet pour traverser la ligne) nécessaire pour considérer qu’un nouvel objet se trouve derrière, sans aucun écart. Un rapport par défaut de 3 est proposé pour que les personnes poussant des chariots ou des poussettes ne soient pas comptées deux fois. Si l’environnement ne donne pas cette possibilité, diminuez le rapport. Par exemple, choisissez une valeur de 2,2. |
3,00 (désactivé) |
Prise en charge de comptages multiples pour la longueur |
Prend en compte les cas où plusieurs personnes traversent la ligne dos à dos sans créer d’écart. |
Vrai (désactivé) |
Suivi des objets |
||
Faire tous les objets au premier plan |
Tous les objets détectés sont mis au premier plan et sont affichés. |
Faux |
Ne pas fusionner les enregistrements qui se chevauchent |
Lorsque deux objets se croisent, ils ne sont pas fusionnés en un seul objet. |
Vrai |
Sensibilité du premier plan |
Ajuste la sensibilité du moteur aux objets suivis, et permet de réduire les fausses alertes dues aux arbres secoués par le vent ou d’augmenter la probabilité qu’un objet peu visible (par exemple, une personne partiellement cachée par des véhicules dans un parking) soit suivi. |
Milieu |
Spécifier une distance minimum qu’un objet doit parcourir pour qu’il devienne un objet suivi |
Permet de détecter uniquement les pistes d’une certaine longueur. |
Faux |
Distance minimum de déplacement (mètres) |
|
1,0 |
Réduire les fausses alertes dues à la neige |
Permet de supprimer les alertes dues à la neige. |
Vrai |
Suivre les petits objets |
Les objets mesurant moins de 5/16 mètres ne sont pas supprimés s’il neige. |
Faux |
Tâche 2 : Création d’une règle à l’aide du moteur VE150
Pour configurer une règle à l'aide du moteur VE150 :
1. Vous devez configurer le moteur VE150 avant de créer une règle qui l'utilise.
2. Dans le menu Serveur, sélectionnez Configuration puis Règles.
3. Cliquez sur Nouveau. L'Assistant de règles s'affiche. Lisez la présentation et cliquez sur Suivant.
4. Cochez la case en regard du nom de la caméra. S'il s'agit d'une caméra PTZ, cochez la case Position de visite caméra.
5. Dans la liste déroulante Sélectionner un moteur vidéo pour cette caméra, sélectionnez VE150.
6. Dans le cas d’une barrière numérique, si le mode Suivi extérieur est sélectionné :
a. Cliquez sur N’importe quelle barrière ou Supprimer une barrière pour dessiner et effacer les barrières numériques. Les flèches indiquent la direction dans laquelle l’objet en cause doit traverser la ou les lignes pour qu’une alarme se déclenche.
b. Double-cliquez sur les flèches pour modifier leurs propriétés.
• La flèche rouge indique qu’un objet traversant la ligne dans cette direction déclenchera une alarme.
• La flèche verte indique qu’un objet traversant la ligne dans cette direction ne déclenchera pas d’alarme.
• Il est possible de dessiner plusieurs lignes de barrières.
Si l’option Toutes les barrières est sélectionnée, l’objet doit traverser toutes les barrières dessinées pour déclencher l’alarme. |
7. Délimitez la zone d'alarme :
• Sélectionnez l’option Effacer pour effacer le masque rouge.
• Sélectionnez l’option Dessiner pour dessiner le masque rouge.
• Le curseur Taille permet de régler l'épaisseur du tracé du stylo.
8. Les paramètres suivants s’appliquent uniquement aux zones d’alarme :
• N’importe quelle partie de la zone indique qu’une alarme peut se déclencher quel que soit l’emplacement de l’objet dans la zone d’alerte rouge. Pour déclencher des alarmes lorsque des véhicules se déplacent dans n’importe quelle partie de la zone d’alarme, sélectionnez N’importe quelle partie de la zone.
• En fin de zone indique que l’objet s’est arrêté dans la zone d’alarme. Pour déclencher des alarmes lorsque des véhicules pénètrent dans la zone d’alarme et s’arrêtent dans celle-ci, sélectionnez En fin de zone.
• En début de zone indique que l’objet a commencé à se déplacer dans la zone d’alarme. Pour déclencher des alarmes lorsque des véhicules garés dans la zone d’alarme commencent à bouger, sélectionnez En début de zone.
9. Cochez les cases Classe pour filtrer ou détecter des classes d’objets spécifiques.
10. Cliquez sur Suivant pour passer à l'étape suivante de l'assistant.
• Veillez à utiliser le nombre d’images par seconde approprié et assurez-vous que les ressources d’unité centrale disponibles sur le système sont suffisantes pour effectuer correctement l’analyse.
• Vérifiez que la perspective a été correctement définie dans l’onglet Position de la caméra.
• Si de fausses alarmes se déclenchent à cause des arbres ou des reflets, essayez d’utiliser le Modèle d'arrière-plan dynamique (onglet Environnement). Si les problèmes persistent, contactez Aimetis pour obtenir de l'aide.