VE180 es una buena opción para las aplicaciones de rastreo de personas en interior y exterior.
Este motor de video se puede utilizar para aplicaciones de recuento de personas y cálculo de tiempo de permanencia. Las implementaciones típicas incluyen los edificios comerciales. Las siguientes secciones detallan solamente las configuraciones ideales. Las opciones de configuración aquí descritas no son obligatorias.
El motor VE180 es una herramienta analítica resistente. Utilice el motor VE180 (sobre el VE150 o VE250) en aquellas situaciones en las que las personas estén cruzando o caminando juntas y desee realizarles un seguimiento individual.
VE180 generalmente requiere más capacidad de CPU que los motores VE150 o VE250. |
Configuración |
Condiciones idóneas |
Entorno |
• Lejos de objetos que se muevan, como puertas de ascensores u objetos desplazados, como carros, carritos y equipaje de gran tamaño. • Evite colocar la cámara cerca de escaleras mecánicas o convencionales. Asegúrese de que se rastrean las personas en superficies planas o a nivel para que la detección sea precisa. • Asegúrese de que la cámara puede detectar a las personas en su totalidad y no de forma parcial al estar ocultas por estanterías o paredes bajas. |
Iluminación |
• Al menos 75 lux o superior. • Asegúrese de que la iluminación es constante en el espacio en cuestión y durante el periodo de tiempo que se rastreen personas. • No debe haber objetos brillantes, por ejemplo, suelos con mucho brillo, en la zona donde se rastreen las personas. Un suelo con mucho brillo puede reflejar la luz o las sombras de la zona circundante y generar recuentos falsos. • En la zona de rastreo de interior, si es posible, evite zonas donde incida la luz solar del exterior. Si la luz solar se oscurece ocasionalmente por nubes en movimiento, pueden producirse sombras que atraviesen una línea de recuento. • Según el ángulo que tenga una luz interior, las sombras de las personas que pasen cerca (sin atravesar) de una línea de recuento pueden generar recuentos falsos. |
Líneas de recuento |
• Una vista con cámara elevada es, por lo general, más precisa para contar personas a lo largo de una línea, pero cubre menos superficie que una vista de 45 grados si el techo es bajo. • Intente que haya al menos 1 metro de espacio en el suelo a ambos lados de la línea de recuento. • En vistas en ángulo, intente que haya al menos 2 metros de espacio a ambos lados de la línea de recuento. • Ajuste del tamaño de persona: Una persona que cruce la línea no debe ocupar más de aproximadamente un tercio de la vista en ancho, ni más de la mitad de la vista en alto. |
Colocación de la cámara |
• Tenga en cuenta que la precisión disminuye en el caso de las vistas prácticamente horizontales (por ejemplo, con una inclinación inferior a 20 grados). • Si la cámara se coloca de forma que las personas parezcan tener un tamaño inferior a 20 píxeles en la pantalla, la precisión del recuento disminuirá y necesitará utilizar los ajustes de opciones avanzadas. |
Tarea 1: Configurar VE180
Si desea configurar VE180:
1. En el cliente, en el menú Servidor , seleccione Configuración. A continuación, se muestra el cuadro de diálogo Configuración. Esto le permitirá configurar dispositivos para el servidor seleccionado actualmente.
2 En el panel izquierdo, haga clic en Dispositivos. A continuación, se abre el cuadro de diálogo Dispositivos .
3 Haga clic en la cámara que desee configurar para utilizarla con la analítica de video y haga clic en Editar.
4 Haga clic en la ficha Motores de analítica . De manera predeterminada, se selecciona VE250 automáticamente. Quite la marca de la opción VE250 y seleccione VE180: rastreo de movimiento.
5 Haga clic en la ficha Configuración de analítica . En la lista desplegable Motores de analítica , seleccione Intel_VE180.
6 En la subficha Resumen, haga clic en el botón Seleccionar imagen diferente para seleccionar una imagen de su cámara en la que basar su configuración analítica.
7 Las siguientes subfichas contienen opciones para configurar su analítico.
• Subficha Máscara de procesamiento
• Subficha Posición de la cámara
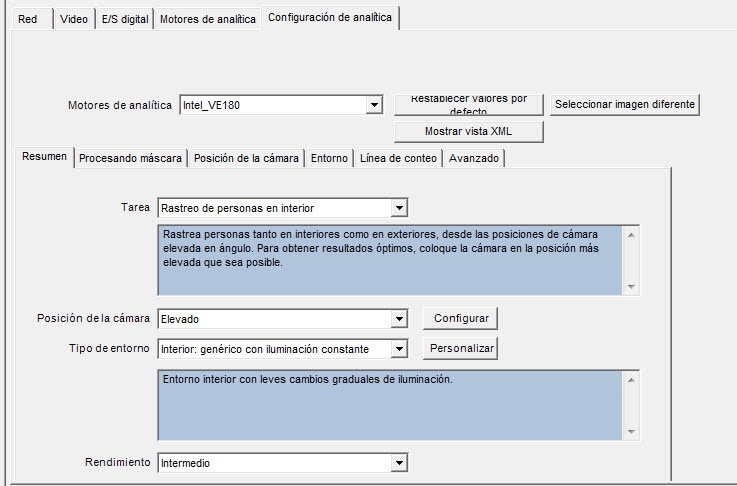
Seleccione y configure la tarea que desea que analítico realice de la siguiente manera:
Si desea realizar un rastreo de personas en interior:
Al seleccionar la tarea Rastreo de personas en interior, de manera predeterminada se selecciona la opción Modelo del fondo Híbrido multicapa en la subficha Entorno. Consulte la sección SubfichaEntorno para obtener información más detallada sobre las opciones de configuración disponibles.
|
Para Rastreo de objetos de varias clases en exterior
Sin calibrar: solo debe utilizarse si los objetos están bien separados y no es necesario un recuento preciso. 3 En la lista des plegable Tipo de entorno, seleccione una de las siguientes opciones. Exterior: Genérico Exterior: Agua Exterior: Cámara térmica Personalizado: aparece automáticamente si se ha modificado la configuración predeterminada de las fichas Entorno o Avanzado. 4 En la lista desplegable Rendimiento, seleccione el nivel de procesamiento de la CPU: Personalizado, Bajo, Intermedio, Alto. De forma predeterminada, está seleccionada la opción Intermedio.
Al seleccionar la tarea Rastreo de objetos de varias clases en exterior, de manera predeterminada se selecciona la opción Modelo del fondo Exterior en la subficha Entorno. Consulte la sección Subficha Entorno para obtener información más detallada sobre las opciones de configuración disponibles.
|
Para el Rastreo de rostro En la lista desplegable Tareas, seleccione Rastreo de rostro. No hay opciones adicionales disponibles en la subficha Resumen. Consulte las secciones que explican la subficha Máscara de procesamiento, subficha Línea de recuento, y las opciones de configuración de la subficha Avanzada. |
En el caso de los dispositivos admitidos, la calibración automática determina la configuración óptima de la cámara para las escenas con personas. Puede pasar a la configuración manual en cualquier momento. El sistema mantiene la última mejor estimación de la posición de la cámara detectada. La opción Calibración automática se encuentra disponible en Configuración del servidor > Dispositivos > Configuración de analítica > Resumen > Posición de la cámara
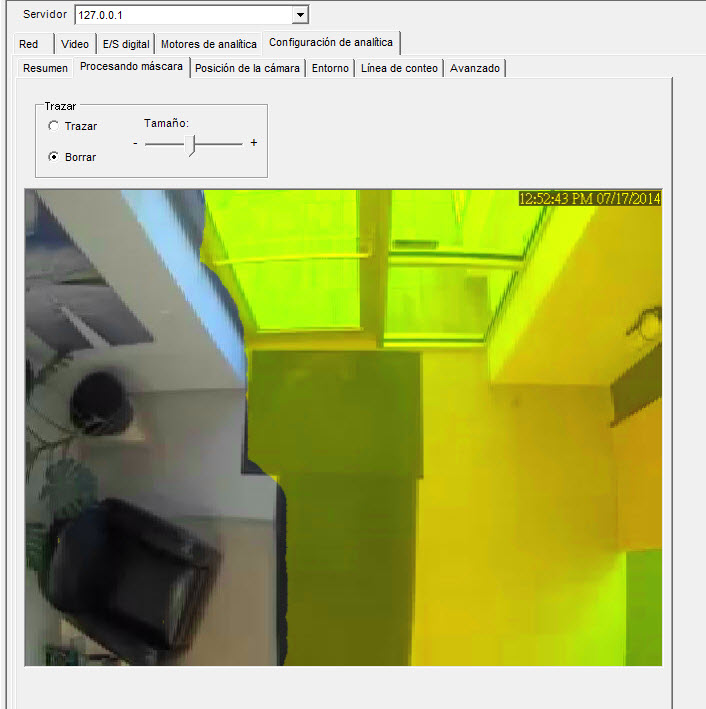
1. Utilice la imagen del video en pantalla para definir el área en amarillo (una máscara) en la que se deben detectar los objetos en movimiento. (Si desea obtener más información, consulte el tema Máscaras y parámetros comunes)
• Seleccione la opción Borrar para eliminar la máscara amarilla.
• Seleccione la opción Trazar para trazar la máscara amarilla.
• El control deslizante Tamaño ajusta el grosor del lápiz.
Opción/diseño |
Descripción |
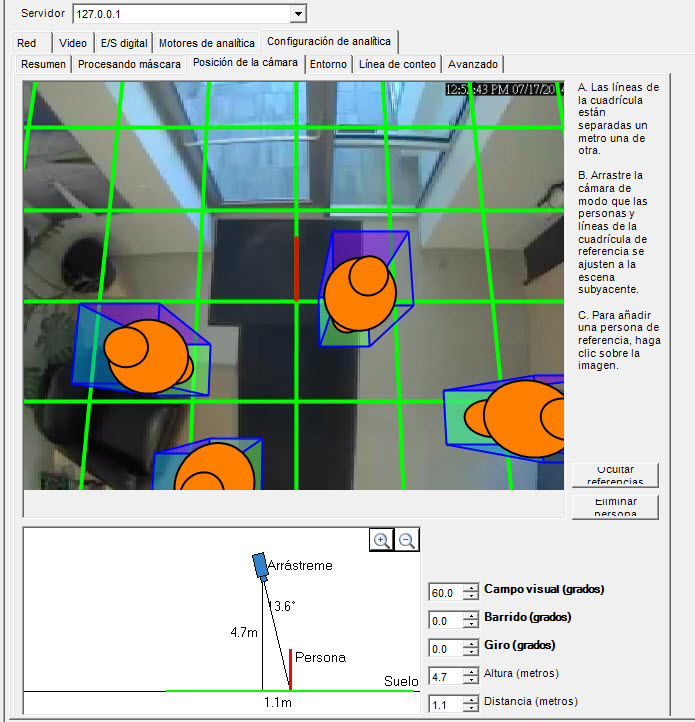
Cuadrícula |
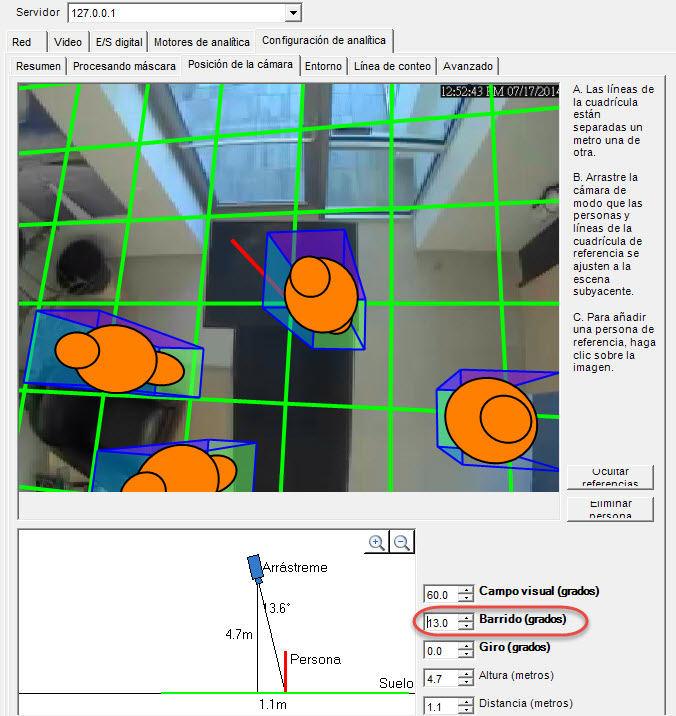
Las líneas de la cuadrícula tienen una separación de 1 metro. Se muestran automáticamente en la escena. |
Icono de persona de referencia |
Una forma de color naranja que representa el tamaño de la persona y su posición en una imagen. En la imagen, aparecen cuatro automáticamente. Coloque los iconos de persona de referencia a distintas posiciones de la imagen, en primer plano o en el fondo, tal como se encontrarían en una situación real. Para añadir más iconos de persona de referencia, haga clic con el mouse en la imagen. |
Botón Eliminar persona |
Permite eliminar un icono de persona de referencia. Haga clic en el icono de la persona de referencia y, a continuación, haga clic en el botón Eliminar persona. |
Botón Mostrar/ocultar imagen real |
Oculta (o muestra) las líneas de la cuadrícula y los iconos de persona de referencia para que pueda ver la escena real en la imagen. |
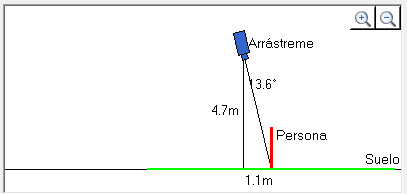
Sección interactiva |
Permite ajustar la cuadrícula y el tamaño de las personas de referencia para ajustarlas a la escena subyacente. Con ayuda del mouse, puede arrastrar el icono de la cámara hacia arriba o abajo y hacia la izquierda o la derecha. |
Iconos de ampliación/reducción +/- |
Permiten acercar o alejar la sección interactiva. |
Campo visual (FOV) |
Campo visual horizontal.
Si aumenta el valor, debe arrastrar el icono de la cámara más cerca (hacia abajo) para ajustar el tamaño correcto de persona. Si reduce el valor, debe arrastrar el icono de la cámara más lejos para establecer el tamaño aproximado. Si obtiene la posición exacta de la cámara midiendo la altura y la distancia reales, deberá ajustar el Campo visual para ajustar el tamaño correcto de los iconos de las personas de referencia en la escena.
Control de perspectiva con la rueda del mouse Le permite controlar la cantidad de perspectiva en la escena sin cambiar la escala global. (Le permite regular el tamaño de un icono de persona a la vez que cambia el campo visual de modo que la inclinación de los demás iconos de persona y su tamaño relativo sean correctos).
Coloque el mouse en el diagrama pequeño. Gire la rueda del mouse para aumentar o reducir el campo visual a intervalos de 2,5 grados, de modo que se cree un cambio proporcionalmente opuesto en el parámetro de distancia del suelo.
Ejemplo: La distancia al suelo es de 10 metros y el campo visual es de 60 grados. Un clic en la rueda del mouse cambia el campo visual a 62,5 grados y la distancia del suelo a (60/62,5)*10 = 9,6 m. Un clic en la rueda del mouse en dirección contraria cambia el campo visual a 57,5 grados y la distancia del suelo a (60/57,5)*10 = 10,43 m. |
Barrer |
Movimiento de la cámara de izquierda a derecha, o viceversa, en torno a un eje vertical imaginario que atraviesa el campo visual de la cámara.
Cuando la cámara está orientada hacia el suelo, simplemente inclina el plano del suelo. Si la posición de la cámara es más horizontal, la imagen mostrada es como una rotación del plano del suelo.
En esta imagen, la opción Barrer inclina la cuadrícula hacia el plano del suelo, lo cual no es correcto si observamos la escena real.
Esta opción es más útil en vistas con cámara casi elevada en que la cámara está orientada hacia el lateral (es decir, la deflexión con respecto a la vertical no coincide exactamente con el eje vertical de la vista de la cámara). |
Girar |
Giro de la cámara en torno al eje, que parte directamente de la cámara desde el centro de la vista.
Resulta útil en una vista en ángulo en que la cámara esté ligeramente girada, donde una línea vertical en la realidad no sea tal en la imagen. También puede ser útil si el suelo de la imagen parece estar ligeramente inclinado de izquierda a derecha. |
Campos Altura y Distancia |
Los valores de estas opciones corresponden a los movimientos del icono de la cámara en la sección interactiva. |
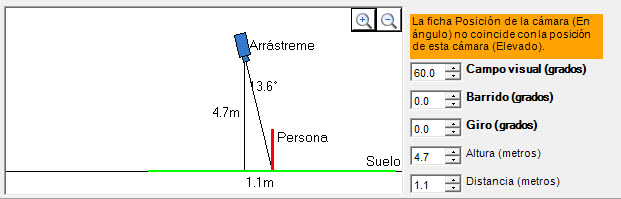
Mensaje de advertencia |
Symphony muestra un mensaje de advertencia si el ángulo de la cámara no coincide con la selección de la opción Cámara elevada. |
Al seleccionar la tarea Rastreo de personas en interior, de manera predeterminada se selecciona la opción Modelo del fondo Híbrido multicapa en la subfichaEntorno. Este es el modelo de fondo recomendado para la mayoría de las aplicaciones en interior. Según el entorno, es posible que quiera modificar las siguientes opciones de configuración de Modelo de fondo Híbrido multicapa para optimizar los resultados de analítica.
Común
Opción |
Descripción |
Duración de aprendizaje de fondo (segundos) |
Determina la cantidad de tiempo aproximada que tardará un objeto de primer plano que está detenido en fundirse con el fondo. Importante: Si un objeto tiene un movimiento periódico durante un periodo superior al tiempo especificado, ese objeto siempre se considerará un objeto de primer plano (nunca se fusiona con el fondo). El fondo se actualiza en todo momento, no solo cuando arranca el motor de analítica. |
Sensibilidad del fondo |
Establece la sensibilidad mínima del fondo necesaria para detectar un objeto como objeto de primer plano. Importante: Si se establece un valor bajo, los objetos con colores similares al del fondo NO se detectarán como objetos válidos para el rastreo. |
Aprender comportamiento normal |
Aprende el porcentaje de tiempo en que cada píxel está en movimiento y puede ignorarlo posteriormente. Es de gran utilidad, por ejemplo, cuando se rastrean embarcaciones en el agua. Esta función está desactivada de manera predeterminada. |
Detección de cambios grandes
Opción |
Descripción |
Método |
• % de la pantalla a la que afecta el cambio: Detecta el porcentaje de la escena que se considera de primer plano. Si el porcentaje del primer plano es demasiado elevado, se activa el aprendizaje del modelo. • Cambio del brillo: Supervisa la escena para detectar cambios bruscos o globales del brillo en la imagen (probablemente causados por un cambio en la iluminación o de las condiciones meteorológicas). • Cambio del espectro: Supervisa la escena para detectar cambios generales bruscos de brillo, pero es menos sensible a los cambios locales (por ejemplo, una persona pasando con un abrigo oscuro). • Cambio combinado: Una combinación del % de cambio de la pantalla y del cambio del espectro. |
Sensibilidad |
Un rango de valor entre 0 y 100. Una sensibilidad alta significa que se reactiva fácilmente el reaprendizaje. Por ejemplo, la sensibilidad será del 80 % cuando el primer plano corresponda al 20 % de la pantalla, mientras que si la sensibilidad es baja, el aprendizaje se activará tan solo en situaciones extremas. |
Tiempo de espera antes de reanudar el rastreo (segundos) |
Permite definir el tiempo que debe transcurrir para reanudar los objetos de rastreo. El valor idóneo sería cero, pero si observa un problema de iluminación que puede provocar falsas alarmas si se empieza a rastrear inmediatamente, establezca el valor de esta opción con el número de segundos necesarios para que la luz se estabilice antes de que se inicie el rastreo. |
Eliminar sombra/iluminación
Opción |
Descripción |
Eliminar sombra/iluminación |
Esta función está desactivada de manera predeterminada. |
Intensidad |
Un ajuste de nivel de sensibilidad elevado resulta útil en los casos en que se tiene una sombra oscura muy intensa. Esta función está desactivada de manera predeterminada. Un ajuste de nivel de sensibilidad bajo resulta útil en los casos en que se tiene una sombra clara. Ejemplo: 0,1 = una sombra clara 1 = una sombra oscura muy intensa |
Existen opciones
de configuración y modelos de fondo adicionales para las situaciones en
las que los parámetros de interior predeterminados no sean suficientes
para sus necesidades.
Consulte el artículo Aimetis Knowledge Base n.°
10305 para obtener más información sobre las opciones adicionales de configuración
de VE180 para el rastreo de personas en interior.
Al
seleccionar la tarea Rastreo
de objetos de varias clases en exterior, de manera predeterminada
se selecciona la opción Modelo
del fondo Exterior en la subficha
Entorno.
Según
el entorno, es posible que quiera modificar algunas de las opciones de
configuración del modelo de fondo para optimizar los resultados de analítica.
Detección de nieve
Opción |
Descripción |
Detección de nieve |
Active esta opción para configurar el modelo de fondo para detectar y rastrear las áreas que cubre la nieve. Esta función está desactivada de manera predeterminada. |
Detectar objetos pequeños
Opción |
Descripción |
Detectar objetos pequeños |
Active esta opción para configurar el modelo de fondo para detectar y rastrear los objetos de escala más pequeña. Por ejemplo, una cámara de un edificio de oficinas que abarca una zona de alto tránsito de personas tendría, uniformemente, objetos pequeños en la vista de la cámara. |
Eliminar sombra/iluminación
Opción |
Descripción |
Simple |
Esta función está activada de manera predeterminada. Utiliza menos CPU que la Compleja. Funciona en la mayoría de las situaciones. |
Compleja |
Cuando hay sombras muy marcadas, la función Compleja elimina más sombras pero utiliza más CPU. |
Intensidad |
Define con qué grado de agresividad se deben se eliminar las sombras. • Incrementar el valor de intensidad puede ocasionar un incremento en la omisión de posibles objetos. • Disminuir el valor de intensidad puede hacer que se rastreen sombras como objetos. |
Rastrear objetos que se mueven lentamente
Opción |
Descripción |
Rastrear objetos que se mueven lentamente |
Rastrea un objeto que se mueve muy lentamente a través del video, o un objeto que se acerca o se aleja directamente hacia o desde la cámara (lo cual asemeja un movimiento lento). Esta función está desactivada de manera predeterminada. Cuando está desactivada, los objetos que se mueven lentamente tienden a formar parte del fondo y no se rastrean. Al activar esta opción, se rastrearán los objetos que se muevan lentamente. Importante: Esta opción puede aumentar algunas falsas alarmas en situaciones en las que un objeto permanezca quieto en el video durante mucho tiempo. |
Velocidad del objeto |
Categoriza la velocidad del objeto rastreado. |
Contraste del objeto
Opción |
Descripción |
Contraste del objeto |
Controla cómo debe ser la sensibilidad del modelo del fondo para percibir similitudes entre el fondo y los objetos. Si un objeto en la vista de la cámara parece similar al fondo (un fondo oscuro y una persona con vestimenta oscura), al aumentar el umbral de contraste del objeto se incrementa la capacidad del modelo de detectar el objeto contra el fondo oscuro. |
Opciones de detección de cambios grandes
Opción |
Descripción |
Método |
• % de la pantalla a la que afecta el cambio: Detecta el porcentaje de la escena que se considera de primer plano. Si el porcentaje del primer plano es demasiado elevado, se activa el aprendizaje del modelo. • Cambio del brillo: Supervisa la escena para detectar cambios bruscos o globales del brillo en la imagen (probablemente causados por un cambio en la iluminación o de las condiciones meteorológicas). • Cambio del espectro: Supervisa la escena para detectar cambios generales bruscos de brillo, pero es menos sensible a los cambios locales (por ejemplo, una persona pasando con un abrigo oscuro). • Cambio combinado: Una combinación del % de cambio de la pantalla y del cambio del espectro. |
Sensibilidad |
Un rango de valor entre 0 y 100. Una sensibilidad alta significa que se reactiva fácilmente el reaprendizaje. Por ejemplo, la sensibilidad será del 80 % cuando el primer plano corresponda al 20 % de la pantalla, mientras que si la sensibilidad es baja, el aprendizaje se activará tan solo en situaciones extremas. |
Tiempo de espera antes de reanudar el rastreo (segundos) |
Permite definir el tiempo que debe transcurrir para reanudar los objetos de rastreo. El valor idóneo sería cero, pero si observa un problema de iluminación que puede provocar falsas alarmas si se empieza a rastrear inmediatamente, establezca el valor de esta opción con el número de segundos necesarios para que la luz se estabilice antes de que se inicie el rastreo. |
Existen opciones
de configuración adicionales para las situaciones en las que los parámetros
de exterior predeterminados no sean suficientes para sus necesidades.
Consulte el artículo Aimetis Knowledge Base n.°
10306 para obtener más información sobre las opciones adicionales de configuración
de VE180 para el rastreo de personas en exterior.
Haga clic en esta subficha si desea utilizar la analítica como función de recuento de personas.
1. Asegúrese de que las máscaras Posición de la cámara y Análisis de movimientos se han configurado correctamente y, a continuación, haga clic en la subficha Línea de recuento.
2. De forma predeterminada, está seleccionada la opción Trazar línea de recuento.
3. Haga clic con el botón izquierdo en la imagen y trace una línea que contará los elementos (personas) que pasen por el área delineada.
• La línea aparece con flechas que indican que el movimiento detectado es Entrante o Saliente con respecto al área trazada.
• Si desea invertir la orientación Entrante-Saliente de la línea, trace la línea en la dirección opuesta. (Elimine primero la línea original).
4. Haga clic en Aceptar para guardar la configuración.
Según el entorno, es posible que necesite modificar las siguientes opciones de configuración del modelo de fondo para optimizar los resultados de analítica de la siguiente manera:
Opción |
Descripción |
IPS de análisis |
Indica cuántos fotogramas analizará el sistema. Por lo general, el valor predeterminado no debería modificarse. No obstante, en muchos casos es posible reducir la velocidad de fotogramas de análisis para conservar la CPU. Esto puede afectar negativamente al rendimiento del algoritmo. |
Resolución de captura |
Muestra la resolución con la que se está grabando el video. Este valor puede cambiarse en la configuración del dispositivo. |
Resolución de análisis |
Al establecer el mismo valor para Resolución de análisis y Resolución de captura, se garantiza la detección de objetos a la mayor distancia posible. Sin embargo, para conservar los recursos de la CPU se puede reducir la resolución del video enviado para análisis. La reducción de la resolución disminuirá los requisitos de la CPU, pero también disminuirá el intervalo de detección de la analítica de video. |
La mayoría de los ajustes de la subficha Avanzado son únicamente para expertos. Los valores solo deben cambiarse en casos en los que el motor de analítica no funcione de la manera esperada.
Para VE180, Rastreo de personas en interior, consulte el artículo Knowledge Base n.° 10305 para obtener más información sobre las opciones adicionales de configuración de VE180 para el rastreo de personas en interior.
Para VE180, Rastreo de objetos en exterior, consulte el artículo Knowledge Base n.° 10306 para obtener más información sobre las opciones adicionales de configuración de VE180 para el rastreo de personas en exterior.
Tarea 2: Crear una regla con el motor VE180
Si desea configurar una regla con el VE180:
1. Debe configurar el VE180 antes de crear una regla que utilice el VE180.
2. En el menú Servidor, seleccione Configuración y, a continuación, seleccione Reglas.
3. Haga clic en Nuevo. Se abrirá el Asistente para reglas. Lea la información general y haga clic en Siguiente.
4. Seleccione la casilla de verificación junto al nombre de la cámara. Si se trata de una cámara PTZ, marque la casilla de verificación de posición del recorrido de la cámara.
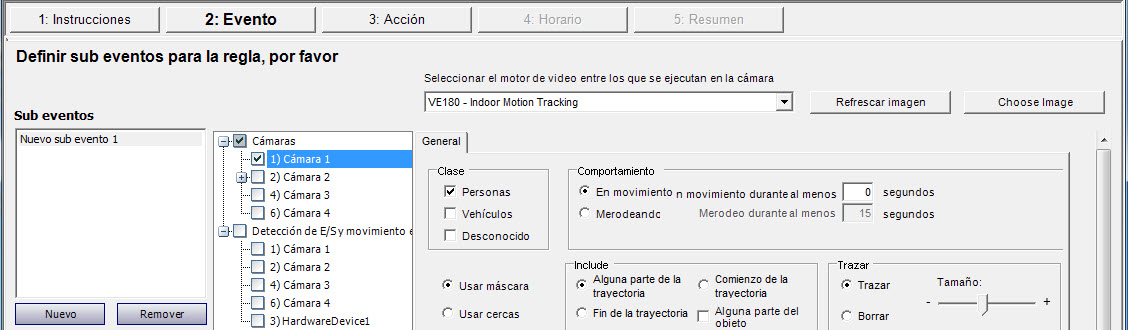
5. En la lista desplegable Seleccionar un motor de video para los que se ejecutan en una cámara, seleccione el VE180.
6. Para establecer una cerca digital, seleccione la opción Usar cercas:
a. Seleccione la opción Alguna cerca y trace una línea sobre la imagen con el mouse. Las flechas, que se muestran automáticamente al trazar una línea, definen la dirección equivocada que debe llevar el objeto al pasar por ella para provocar una alarma.
b. Con la opción Alguna cerca seleccionada, haga clic en las flechas para cambiar las propiedades.
• La flecha roja indica que un objeto que cruce la línea en la dirección de la flecha provocará una alarma.
• La flecha verde indica que un objeto que cruce la línea en la dirección de la flecha NO provocará una alarma.
• Se pueden dibujar varias cercas de límite.
Si se ha seleccionado Todas las cercas, el objeto debe cruzar por todas las cercas dibujadas para provocar la alarma. |
• Para eliminar una línea, seleccione la opción Borrar línea y haga clic con el botón izquierdo en el extremo de la línea que desee eliminar en la imagen.
7. Para designar una zona de alarma, seleccione la opción Usar máscara.
• Seleccione la opción Borrar para eliminar la máscara roja.
• Seleccione la opción Trazar para trazar la máscara roja.
• El control deslizante Tamaño ajusta el grosor del lápiz.
Los siguientes ajustes solo se aplican a zonas de alarma:
• Alguna parte de la trayectoria indica que el objeto puede estar en cualquier parte de la zona de alarma roja para activar una alarma. Para activar una alarma cuando haya objetos que se muevan en cualquier parte de la zona de alarma, seleccione Alguna parte de la trayectoria.
• Fin de la trayectoria indica que el objeto se ha detenido en la zona de alarma. Para activar una alarma cuando haya objetos que entren en la zona de alarma y se detengan en ella, seleccione Fin de la trayectoria.
• Comienzo de la trayectoria indica que el objeto ha empezado a moverse en la zona de alarma. Para activar una alarma cuando haya objetos en la zona de alarma que empiecen a moverse, seleccione Comienzo de la trayectoria.
• Alguna parte del objeto indica que cualquier parte del objeto puede estar en cualquier parte de la zona de alarma roja para activar una alarma.
8. Haga clic en Siguiente para continuar con el paso siguiente del asistente.