El VE150 es una buena opción para aplicaciones de rastreo de movimiento de interior y de exterior. El motor puede clasificar la diferencia entre personas y vehículos, así como detectar si el objeto se está deteniendo, está empezando a moverse o simplemente está pasando por la escena. Por lo tanto, se pueden designar reglas de alarma en relación a estas funciones.
Entre las implementaciones más habituales se incluyen:
• edificios comerciales, en los que se deben detectar personas o vehículos;
• bases militares, en las que se deben detectar objetos que entren en una zona de alarma o que crucen un perímetro predefinido; o
• concesionarios y zonas en construcción, en los que los guardas de seguridad a tiempo completo no son un método rentable para detectar personas o vehículos fuera del horario habitual.
El VE150 producirá un número muy inferior de falsas alarmas provocadas por un entorno de exterior cambiante, en comparación con algoritmos de detección de movimiento normales. El VE150 dispone de distintos modos de funcionamiento, que se pueden utilizar para aplicaciones de recuento de personas en interiores y cálculo de tiempo de permanencia.
Tarea 1: Configurar el VE150
Para configurar el VE150:
1. En el Cliente Symphony, en el menú Servidor, seleccione Configuración. Se abrirá el cuadro de diálogo Configuración. Esto le permitirá configurar dispositivos para el servidor seleccionado actualmente.
2. En el panel izquierdo, haga clic en Dispositivos. Se abrirá el cuadro de diálogo Dispositivos.
3. Haga clic en la cámara que desee configurar para utilizarla con la analítica de vídeo y haga clic en Editar.
4. Haga clic en la ficha Motores de analítica y seleccione VE150. De forma predeterminada, está seleccionado el VE250, por lo que deberá cancelar primero la selección del VE250.
5. Haga clic en la ficha Configuración de analítica (Ficha Configuración de analítica).
Ficha Configuración de analítica del VE150
Ficha Configuración de analítica
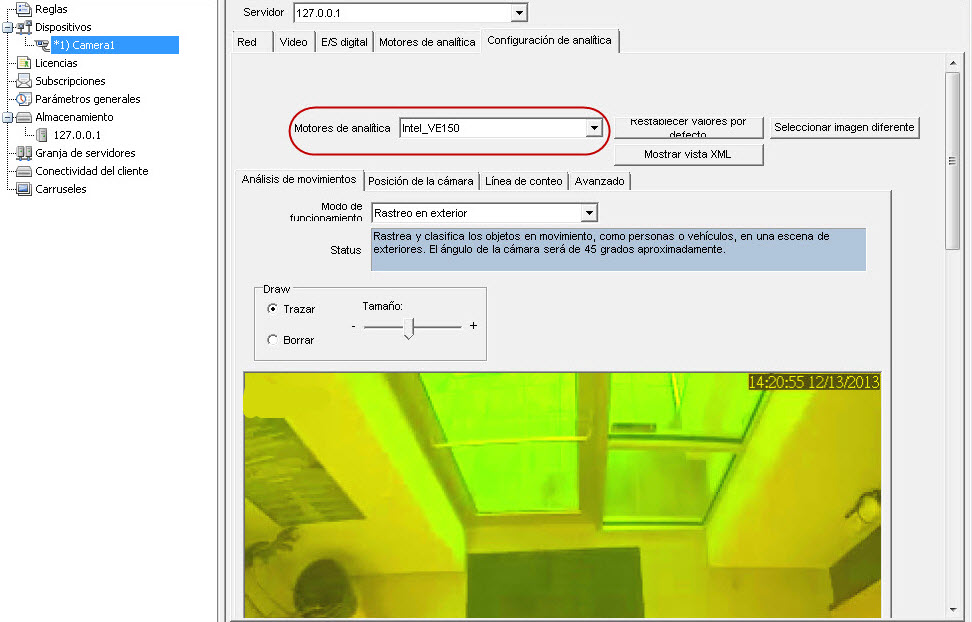
1. En la lista desplegable Motores de analítica, seleccione Intel_VE150.
2. Haga clic en la subficha Análisis de movimientos. Se mostrará la imagen actual del vídeo.
Subficha Análisis de movimientos
1. En la lista desplegable Modo de funcionamiento, seleccione un modo. El campo Estado muestra una descripción del modo de funcionamiento seleccionado.
• Rastreo en exterior
• Rastreo de personas con cámara no elevada
• Rastreo de personas con cámara elevada
• Recuento de personas con cámara elevada
• Detección de dirección incorrecta
• Rastreador de manchas simples
2. Deberá definir un área de la imagen para la detección de movimiento. Si la imagen no es adecuada, haga clic en Seleccionar imagen diferente. Se abrirá el cuadro de diálogo Seleccionar imagen. Seleccione una imagen de la escala de tiempo.
3. Utilice la imagen del vídeo en pantalla para definir el área en amarillo (una máscara) en la que se deben detectar los objetos en movimiento. (Si no está seguro de entender el concepto, consulte la sección Máscaras: áreas en las que Symphony rastrea objetos.)
• Seleccione la opción Borrar para eliminar la máscara amarilla.
• Seleccione la opción Trazar para trazar la máscara amarilla.
• El control deslizante Tamaño ajusta el grosor del lápiz.
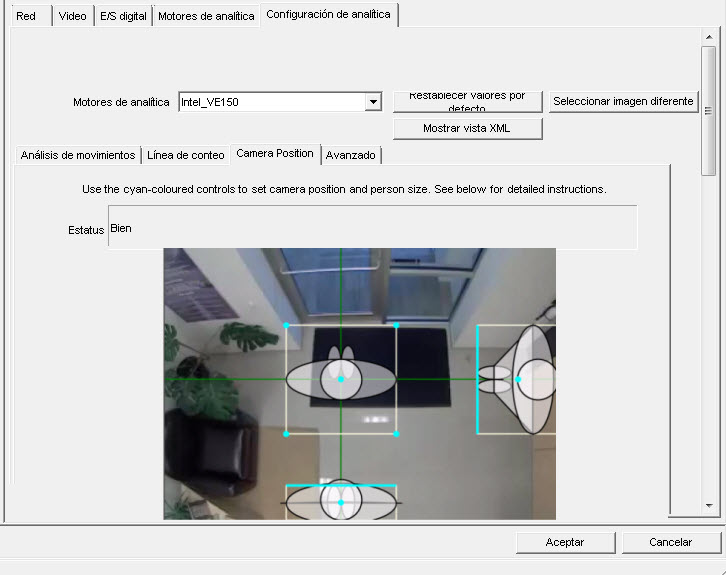
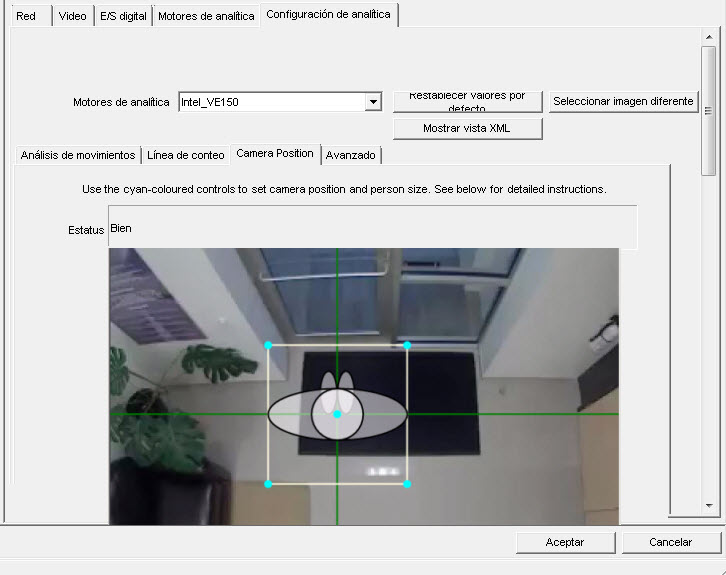
Subficha Posición de la cámara
1. Haga clic en la subficha Posición de la cámara. En función del Modo de funcionamiento que seleccione en la subficha Análisis de movimientos, variarán las opciones de Posición de la cámara.
Modos de funcionamiento: Rastreo en exterior, Rastreo de personas con cámara no elevada y Detección de dirección incorrecta |
Especifique la posición de la cámara con respecto a los objetos de la imagen capturada:
Modifique las tres líneas de forma que los tamaños de las personas de referencia se muestren con precisión en la escena. (Para obtener más información sobre este concepto, consulte la sección Perspectiva.) • Cambie el tamaño de las líneas arrastrando sus extremos. • Mueva las líneas arrastrándolas al centro. • Las líneas representan la distancia en el suelo. • El valor de la longitud se indica únicamente para que comprenda la relación entre las líneas (primer plano frente a una extensión a lo lejos). Por lo tanto, las unidades de medida son irrelevantes. • Para trasladar una persona de referencia, haga clic con el botón izquierdo en los pies del icono de persona y arrástrelo. • Para añadir a una persona de referencia, haga clic con el botón derecho en la ubicación que desee de la imagen. • Para eliminar a una persona de referencia, haga clic con el botón izquierdo en el icono de persona y pulse Eliminar.
Modo de funcionamiento Rastreo en exterior |
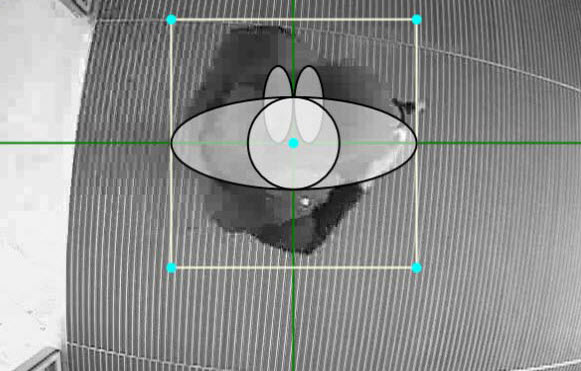
Modo de funcionamiento: Rastreo de personas con cámara elevada |
Especifique la posición de la cámara con respecto a los objetos de la imagen capturada: • Puede configurar todos los objetos resaltados en cian. • Mueva el punto central de color cian del cuadro de centrado a otra ubicación justo debajo de la cámara. • Con los puntos de los extremos, ajuste el cuadro de centrado al tamaño de una persona media. • Ajuste las líneas exteriores de color cian de los cuadros de modo que estos representen el tamaño de una persona media. • Si la cámara está situada en un lugar muy elevado y está orientada en perpendicular al suelo, ajuste los tres cuadros al mismo tamaño.
Modo de funcionamiento Rastreo de personas con cámara elevada |
Modo de funcionamiento: Recuento de personas con cámara elevada |
Especifique la posición de la cámara con respecto a los objetos de la imagen capturada:
• Puede configurar todos los objetos resaltados en cian. • Mueva el punto central de color cian del cuadro de centrado a otra ubicación justo debajo de la cámara. • Con los puntos de los extremos, ajuste el cuadro de centrado al tamaño de una persona media.
|
2. Haga clic en Aplicar para guardar la configuración.
1. Asegúrese de que las máscaras Posición de la cámara y Análisis de movimientos se han configurado correctamente y, a continuación, haga clic en la subficha Línea de recuento.
2. De forma predeterminada, está seleccionada la opción Trazar línea de conteo.
3. Haga clic con el botón izquierdo en la imagen y trace una línea que contará los elementos (personas o coches) que pasen por el área delineada.
• La línea aparece con flechas que indican que el movimiento detectado es Entrante o Saliente con respecto al área trazada.
4. Haga clic en Aceptar para guardar la configuración o haga clic en la subficha Avanzado para realizar más ajustes.
Los ajustes de la subficha Avanzado son únicamente para expertos. Los valores solo deben cambiarse en casos en los que el motor de analítica no funcione de la manera esperada. |
1. Introduzca un valor de fotogramas por segundo en el campo IPS de análisis.
• Este valor indica cuántos fotogramas analizará el sistema. Por lo general, el valor predeterminado no debería modificarse. No obstante, puede haber casos en los que sea posible reducir la velocidad de fotogramas de análisis para reducir el uso de la CPU. Esto puede afectar negativamente al rendimiento de los algoritmos.
• Al igual que con el campo Resolución de análisis, el valor de IPS de análisis puede ser distinto del de Fotogramas por segundo de la grabación.
2. Establezca el valor de Resolución de análisis, según sea necesario.
• Al establecer el mismo valor para Resolución de análisis y Resolución de captura, se garantiza la detección de objetos a la mayor distancia posible. Sin embargo, para conservar los recursos de la CPU se puede reducir la resolución del vídeo enviado para su análisis. La reducción de la resolución disminuirá los requisitos de la CPU, pero también disminuirá el intervalo de detección de la analítica de vídeo.
3. En la lista desplegable Modelo del fondo, seleccione el modelo que represente mejor el entorno en el que la cámara esté grabando (por ejemplo, un área con mucho movimiento). Para ver una descripción completa del uso, consulte la Uso del modelo del fondo.
Ajustar el Modelo del fondo suele ser el mejor modo de reducir falsas alarmas. (Requiere un mayor uso de la CPU.) |
Modelo del fondo |
Cuándo utilizarlo |
Estático |
Utilícelo cuando el fondo sea relativamente estático (sin movimientos periódicos en el fondo, como árboles que se mueven). Este es el modelo del fondo de Symphony más rápido. |
Dinámico |
Utilícelo cuando haya objetos que se muevan de forma periódica (como la rama de un árbol que se mueve hacia adelante y hacia atrás con un viento constante, o debido a un montaje de cámara inestable). Este modelo del fondo puede administrar fondos estáticos y dinámicos, pero utiliza más recursos de la CPU que el modelo Estático y, por lo tanto, no se recomienda para fondos estáticos.
Importante: un entorno puede parecer estático durante el día, pero la lluvia por la noche creará un entorno dinámico. Por lo tanto, debería seleccionar el ajuste Dinámico. |
Dinámico de capa doble |
Es parecido al modelo del fondo Dinámico pero es capaz de rastrear objetos que estén detenidos durante periodos de tiempo breves. Utilícelo en áreas de exterior donde desee rastrear, por ejemplo, a personas que estén quietas durante 30-60 segundos. |
Espacio temporal |
Solo rastrea el movimiento constante, de modo que es capaz de reducir enormemente las falsas alarmas por el movimiento aleatorio de las ramas de los árboles y otros objetos en el fondo debido al viento. Esto utilizará más recursos de la CPU y reducirá el intervalo de detección de la analítica de vídeo. |
4. Las opciones y ajustes predeterminados mostrados variarán en función del Modo de funcionamiento y el Modelo del fondo seleccionados. Antes de seleccionar las opciones, aprenda a utilizarlas mediante la información proporcionada en la Opciones avanzadas disponibles según el modelo del fondo seleccionado.
Opción |
Descripción |
Ajuste predeterminado |
Aprender comportamiento normal |
Aprende el porcentaje de tiempo en que cada píxel está en movimiento y puede ignorarlo posteriormente. Es de gran utilidad, por ejemplo, cuando se rastrean embarcaciones en el agua. |
Falso |
Opciones |
||
Apariencia |
Manual, Muy brillante, Gris mate |
Manual |
Límite inferior |
Si se selecciona Manual. |
0,70 |
Límite superior |
Si se selecciona Manual. |
1,50 |
Modo |
Movimiento coherente, Comportamiento anormal, Dirección opuesta |
Movimiento coherente |
Marginalización de apariencia |
Solo detecta patrones de movimiento y no se ve afectado por las apariencias. |
Verdadero |
Umbral |
Umbral de detección para el patrón Espacio temporal. |
0,03 |
Fotogramas de fondo |
Si se selecciona Comportamiento anormal. |
255 |
Fotogramas de primer plano |
Si se selecciona Comportamiento anormal. |
10 |
Dirección |
Si se selecciona Dirección opuesta. Solo lectura. |
242 |
Contraste de primer plano |
Establece el contraste mínimo necesario para detectar un objeto como objeto de primer plano. Importante: si se establece un valor bajo, los objetos con colores parecidos al del fondo no se detectarán como objetos válidos para el rastreo. |
Bajo |
Restablecer estado del fondo |
Si cambia este porcentaje del fotograma, se restablece el fondo. |
100 |
Contraste de primer plano para detectar obstrucciones en la cámara |
Establece el contraste mínimo necesario entre el fondo y el primer plano antes de considerar necesario el cambio en un escenario en que la cámara tenga obstrucciones. |
Bajo |
Duración de aprendizaje de fondo (segundos) |
Determina la cantidad de tiempo aproximada que tardará un objeto de primer plano que está detenido en fundirse con el fondo. Importante: si un objeto tiene un movimiento periódico durante un periodo superior al tiempo especificado, ese objeto siempre se considerará un objeto de primer plano (nunca se fusiona con el fondo). El fondo se determina según los últimos segundos de vídeo de la opción Actualizar fondo (segundos). El fondo se actualiza en todo momento, no solo cuando arranca el motor de analítica. |
15 |
Tiempo de espera después de un cambio grande en el fondo y antes de comenzar a rastrear objetos (segundos) |
Le permite establecer cuánto tiempo hay que esperar tras el restablecimiento del fondo y antes de empezar a rastrear objetos. El valor idóneo sería cero, pero si observa un problema de iluminación que puede provocar falsas alarmas si se empieza a rastrear inmediatamente, establezca el valor de esta opción con el número de segundos necesarios para que la luz se estabilice. |
0 |
Umbral de alto contraste |
Umbral utilizado para determinar la distancia a la que puede estar una observación del modelo del fondo aprendido antes de detectarla como primer plano. Un valor reducido (por ejemplo, 5) hará que el modelo del fondo sea más sensible a pequeños cambios en las intensidades de los píxeles.
Nota: el valor puede tener significados diferentes en función del modelo del fondo. |
25 |
Eliminar píxeles fantasma |
Los píxeles que no cambien de valor durante cierto tiempo no se considerarán como primer plano. |
Verdadero |
Rastrear objetos que se mueven lentamente/Velocidad del objeto |
Rastrea un objeto que se mueve muy lentamente en el vídeo. También puede ser un objeto que se acerque directamente hacia la cámara o se aleje directamente desde ella y parezca, por tanto, que se mueve lentamente.
Si la opción Rastrear objetos que se mueven lentamente está desactivada, estos objetos tienden a formar parte del fondo y, por ello, no se rastrean. Si activa esta opción, estos objetos se rastrearán.
Importante: esta opción puede aumentar algunas falsas alarmas en situaciones en las que un objeto permanezca quieto en el vídeo durante mucho tiempo. |
Falso |
Sensibilidad en la sombra |
Controla con qué intensidad se ignoran las sombras (disminución de iluminación) al rastrear objetos que se mueven. Si desplaza el control deslizante a la derecha, permitirá que el motor ignore correctamente más áreas de sombras.
Nota: esto también aumentará la posibilidad de que una persona con ropa oscura en un fondo claro se clasifique como sombra. |
Media (desactivada) |
Sensibilidad a la iluminación |
Controla con qué intensidad se ignoran los aumentos de iluminación. Estos aumentos se producen debido a un foco de luz, como los faros de un coche o al despejarse un día nublado. Si desplaza el control deslizante a la derecha, permitirá que el motor ignore correctamente los aumentos de iluminación.
Nota: esto también aumentará la posibilidad de que una persona con ropa clara en un fondo oscuro se clasifique como aumento de iluminación. |
Media (desactivada) |
Comprobación de nube |
Intenta ignorar el movimiento de las nubes. |
Falso |
Verificar movimiento repentino de fondo |
Intenta eliminar rastreos falsos por el movimiento repentino de objetos en el fondo debido al viento. También eliminará rastreos falsos por movimientos repentinos de la cámara. |
Falso |
Distancia máxima en puntos |
Si se selecciona Verificar movimiento repentino de fondo. Un movimiento repentino se define como el movimiento de un objeto o cámara hasta esta cantidad de píxeles como máximo. |
5 (desactivada) |
Tiempo para despejar fondo de larga duración (segundos) |
Solo está disponible para el modelo del fondo Libro de códigos (Dinámico de capa doble). |
Falso (desactivada) |
Tiempo para despejar fondo de corta duración (segundos) |
Solo está disponible para el modelo del fondo Libro de códigos (Dinámico de capa doble). |
Falso (desactivada) |
Hora de cambiar fondo de corto plazo a largo plazo (segundos) |
Solo está disponible para el modelo del fondo Libro de códigos (Dinámico de capa doble). |
Falso (desactivada) |
Tiempo inicial de aprendizaje del modelo del fondo (segundos) |
Solo está disponible para el modelo del fondo Libro de códigos (Dinámico de capa doble). |
Falso (desactivada) |
Clasificación |
||
Clasificación automática |
Intenta clasificar automáticamente objetos como coches, personas u objetos desconocidos. También incluye codificación de colores. |
Verdadero |
Forzar que todo objeto rastreado sea clasificado como vehículo |
Todo objeto rastreado se clasifica como vehículo. |
Falso |
Forzar que todo objeto rastreado sea clasificado como persona |
Todo objeto rastreado se clasifica como persona. |
Falso |
Forzar que todo objeto rastreado sea clasificado como desconocido |
Todo objeto rastreado se clasifica como desconocido. |
Falso |
Buscar objetos |
||
Usar segmentación basada en contornos |
Mejora la segmentación de objetos que se mueven mediante el contorno. |
Verdadero |
Segmentación sólo-personas |
Si se selecciona Usar segmentación basada en contornos. Intentará mantener a las personas cercanas como objetos rastreados individualmente. Existe la posibilidad de que los vehículos de gran tamaño aparezcan como varios objetos más pequeños. |
Falso |
Fundir objetos más próximos que (metros) |
Los objetos detectados que estén a una distancia entre sí inferior a la especificada se fusionarán en un objeto. |
2,5 |
Tamaño del objeto más pequeño (puntos) |
El motor ignorará los objetos con una anchura inferior al Tamaño del objeto más pequeño. |
2 |
No rastrear objetos mayores que (% de la pantalla) |
Si un objeto detectado tiene una anchura o altura superior al porcentaje especificado para la anchura o altura de la imagen respectivamente, el objeto se ignorará. |
90 |
Recuento de personas mediante línea |
||
Considerar sólo segmentos contiguos |
Al realizar un recuento mediante línea, busca segmentos contiguos. No intenta acumular todos los píxeles de cada dirección. |
Falso (desactivada) |
Relación mínima de anchura de objeto |
Relación de la anchura del objeto considerada como la anchura mínima de una persona (0,33 de forma predeterminada). Por ejemplo, si la anchura del objeto es de 9 píxeles y se cuentan menos de 3 píxeles en una dirección al cruzar la línea, no se contará como objeto. |
0,33 (desactivada) |
Relación máxima de anchura de objeto |
Relación de la anchura del objeto considerada como la anchura máxima de una persona (1,88 de forma predeterminada). Esto solo se considera cuando está activada la opción Compatibilidad con recuento múltiple en anchura. Si se cuentan más píxeles, se considerará una nueva persona. Por ejemplo, si la anchura del objeto es de 9 píxeles y se cuentan más de 9 x 1,88 = 16,92 píxeles en una dirección al cruzar la línea, se contarán dos personas. |
1,85 (desactivada) |
Compatibilidad con recuento múltiple en anchura (de lado a lado) |
Considera casos en los que puede haber más de una persona cruzando la línea de lado a lado al mismo tiempo. |
Verdadero (desactivada) |
Duración del cruce de la línea por parte del objeto (segundos) |
Tiempo que tarda una persona en cruzar la línea. |
1,00 (desactivada) |
Relación mínima de longitud de objeto |
Relación del tiempo necesario para detectar un objeto (con respecto a la duración del cruce de la línea por parte del objeto). Por ejemplo, si la velocidad de análisis es de 10 fotogramas por segundo, es necesario que se detecte suficiente movimiento en al menos 2 fotogramas consecutivos para contar una persona (así como en una anchura de 3 píxeles, como mínimo). |
0,30 (desactivada) |
Relación máxima de longitud de objeto |
Relación del tiempo necesario para considerar que detrás viene un nuevo objeto sin ningún espacio (con respecto a la duración del cruce de la línea por parte del objeto). Se considera una relación predeterminada de 3 para no contar dos veces a las personas que llevan carritos/carros de la compra. Si el entorno no lo permite, disminuya el valor de la relación, por ejemplo, a 2,2. |
3,00 (desactivada) |
Compatibilidad con recuento múltiple en longitud |
Considera casos en los que puede haber varias personas cruzando la línea juntas sin que haya un espacio entre ellas. |
Verdadero (desactivada) |
Rastrear objetos |
||
Hacer que todos los objetos sean de primer plano |
Todos los objetos detectados se convertirán en objetos de primer plano y se mostrarán. |
Falso |
No fusionar rastreos superpuestos |
Cuando los rastreos de dos objetos coincidan no se fusionarán en un objeto. |
Verdadero |
Sensibilidad al primer plano |
Ajusta la sensibilidad del motor para rastrear objetos y puede utilizarse para reducir rastreos falsos por árboles que se mueven con el viento o aumentar la probabilidad de rastrear un objeto poco visible (como personas obstruidas parcialmente por vehículos en un aparcamiento). |
Media |
Especificar la distancia mínima que un objeto debe viajar para convertirse en un objeto rastreado |
Solo intenta detectar rastreos con una longitud determinada. |
Falso |
Viaje mínimo (metros) |
|
1,0 |
Reducir huellas falsas por nieve |
Intenta eliminar las huellas creadas por causa de la nieve. |
Verdadero |
Rastrear objetos pequeños |
Los objetos inferiores a 5/16 metros no se eliminarán como si fueran nieve. |
Falso |
Tarea 2: Crear una regla con el VE150
Para configurar una regla con el VE150:
1. Debe configurar el VE150 antes de crear una regla que utilice el VE150.
2. En el menú Servidor, seleccione Configuración y, a continuación, Reglas.
3. Haga clic en Nuevo. Se abrirá el Asistente para reglas. Lea el resumen y haga clic en Siguiente.
4. Active la casilla de verificación situada junto al nombre de la cámara. Si es una cámara PTZ, active la casilla de verificación de la posición del recorrido de la cámara.
5. En la lista desplegable Seleccionar un motor de video para los que se ejecutan en una cámara, seleccione el VE150.
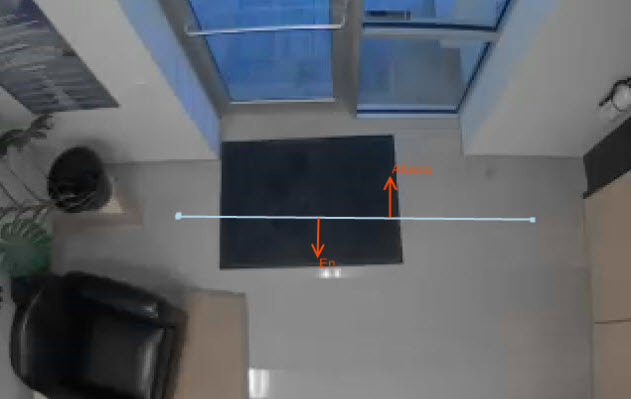
6. Para una cerca digital, suponiendo que se haya seleccionado el modo Rastreo en exterior:
a. Haga clic en Alguna cerca o Eliminar cerca para trazar y borrar las cercas digitales. Las flechas definen qué dirección equivocada debe llevar el objeto al pasar por la línea para provocar una alarma.
b. Haga doble clic en las flechas para cambiar sus propiedades.
• La flecha roja indica que un objeto que cruce la línea en esta dirección provocará una alarma.
• La flecha verde indica que el objeto que cruce la línea en esta dirección no provocará una alarma.
• Se pueden dibujar varias cercas de límite.
Si se ha seleccionado Todas las cercas, el objeto debe cruzar por todas las cercas dibujadas para provocar la alarma. |
7. Para la zona Alarma, marque la zona Alarma:
• Seleccione la opción Borrar para eliminar la máscara roja.
• Seleccione la opción Trazar para trazar la máscara roja.
• El control deslizante Tamaño ajusta el grosor del lápiz.
8. Los siguientes ajustes solo se aplican a zonas de alarma:
• Alguna parte de la trayectoria indica que el objeto puede estar en cualquier parte de la zona de alarma roja para activar una alarma. Para activar una alarma cuando haya vehículos que se muevan en cualquier parte de la zona de alarma, seleccione Alguna parte de la trayectoria.
• Fin de la trayectoria indica que el objeto se ha detenido en la zona de alarma. Para activar una alarma cuando haya vehículos que entren en la zona de alarma y se detengan en ella, seleccione Fin de la trayectoria.
• Comienzo de la trayectoria indica que el objeto ha empezado a moverse en la zona de alarma. Para activar una alarma cuando haya vehículos estacionados en la zona de alarma que empiecen a moverse, seleccione Comienzo de la trayectoria.
9. Active las casillas de verificación Clase para filtrar o detectar clases específicas de objetos.
10. Haga clic en Siguiente para continuar con el paso siguiente del asistente. Consulte la sección Reglas: uso del Asistente para reglas para obtener más información.
En situaciones
habituales, el VE150 puede detectar a una persona a 30,5 m
de la cámara y a un vehículo a 45,7 m de la cámara (suponiendo
que se utilice 4CIF o 640x480 y las condiciones de iluminación
sean adecuadas). Estas distancias dependen de la lente y el zoom
utilizados. |
• Asegúrese de que se está utilizando la velocidad de fotogramas correcta y de que hay suficientes recursos de la CPU disponibles en el sistema para realizar un análisis correcto.
• Compruebe que se ha establecido la perspectiva correctamente ajustando los valores correspondientes de la ficha Posición de la cámara.
• Si se producen molestas falsas alarmas por árboles o reflejos, pruebe con el modelo del fondo Dinámico (ficha Entorno). Si los problemas persisten, póngase en contacto con Aimetis para obtener asistencia.

 Modo de funcionamiento
Recuento de personas con cámara elevada
Modo de funcionamiento
Recuento de personas con cámara elevada