El VE130 es una buena opción para entornos de interior donde solo sea necesario detectar movimiento y no se requiera conocer el tipo de objeto o el recuento de objetos. El VE130 es una buena alternativa a la detección de movimiento basada en la cámara debido a su configuración simplificada y su mayor precisión. La posición de la cámara no tiene grandes limitaciones, lo que convierte al VE130 en un motor de vídeo genérico muy apropiado en numerosas aplicaciones. Si necesita conocer el recuento de objetos o el tiempo de permanencia, use el VE150. Para entornos de exterior, utilice también el VE150, ya que las sombras o los cambios de luz harán que el VE130 no funcione correctamente.
Tarea 1: Configurar el VE130
Para configurar el VE130:
1. En el Cliente Symphony, en el menú Servidor, seleccione Configuración. Se abrirá el cuadro de diálogo Configuración. Esto le permitirá configurar dispositivos para el servidor seleccionado actualmente.
2. En el panel izquierdo, haga clic en Dispositivos. Se abrirá el cuadro de diálogo Dispositivos.
3. Haga clic en la cámara que desee configurar para utilizarla con la analítica de vídeo y haga clic en Editar.
4. Haga clic en la ficha Motores de analítica y seleccione VE130. De forma predeterminada, está seleccionado el VE250, por lo que deberá cancelar primero la selección del VE250.
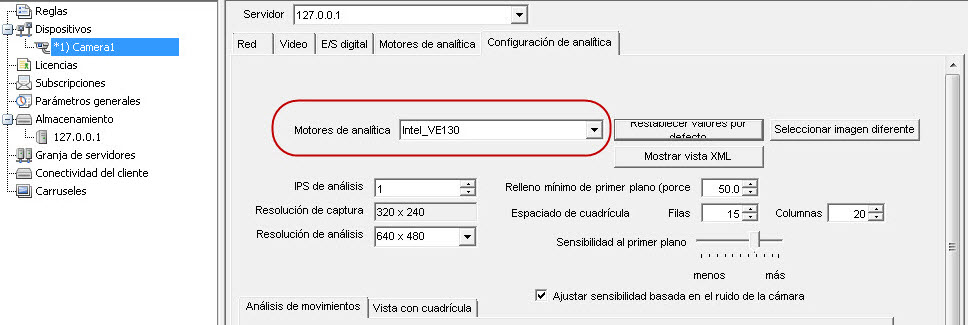
5. Haga clic en la ficha Configuración de analítica (VE130 – Ficha Configuración de analítica (subficha Vista con cuadrícula).
VE130 – Ficha Configuración de analítica (subficha Vista con cuadrícula)
Ficha Configuración de analítica
1. En la lista desplegable Motores de analítica, seleccione Intel_VE130.
2. Haga clic en la subficha Análisis de movimientos. Se mostrará la imagen actual del vídeo.
3. Deberá definir un área de la imagen para la detección de movimiento. Si la imagen no es adecuada, haga clic en Seleccionar imagen diferente. Se abrirá el cuadro de diálogo Seleccionar imagen. Seleccione una imagen de la escala de tiempo.
4. Utilice la imagen del vídeo en pantalla para definir el área en amarillo (una máscara) en la que se deben detectar los objetos en movimiento. (Si no está seguro de entender el concepto, consulte la sección Máscaras: áreas en las que Symphony rastrea objetos.)
• Seleccione la opción Borrar para eliminar la máscara amarilla.
• Seleccione la opción Trazar para trazar la máscara amarilla.
• El control deslizante Tamaño ajusta el grosor del lápiz.
5. (Opcional) Puede ajustar las siguientes especificaciones:
IPS de análisis |
Velocidad de fotogramas a la que el motor de vídeo analiza los fotogramas. Puede establecerse un valor inferior al de la velocidad de fotogramas de grabación. |
Resolución de captura |
Muestra la resolución a la que se está grabando el vídeo. Este valor puede cambiarse en la configuración de Dispositivo. |
Resolución de análisis |
Resolución utilizada para analizar fotogramas. Normalmente su valor es inferior al de Resolución de captura para reducir el uso de la CPU. |
6. Haga clic en la ficha Vista con cuadrícula y ajuste las siguientes especificaciones según sea necesario.
Relleno mínimo de primer plano (porcentaje) |
La escena se divide en una cuadrícula. Este valor especifica qué porcentaje de cada cuadrado de la cuadrícula debe cambiar antes de detectar actividad en dicho cuadrado. |
Espaciado de cuadrícula (puntos) |
Define el espaciado de cuadrícula como Filas y Columnas. |
Sensibilidad al primer plano |
Define el grado de sensibilidad del motor de vídeo con respecto al cambio de escena. Cuanto más sensible sea al cambio, mayor será la probabilidad de que el relleno mínimo de primer plano detecte actividad en el espacio de cuadrícula. |
Ajustar sensibilidad basada en el ruido de la cámara |
|
7. Haga clic en Aceptar para guardar la configuración.
Tarea 2: Crear una regla con el VE130
Para configurar una regla con el VE130:
1. En el menú Servidor, seleccione Configuración y, a continuación, Reglas.
2. Haga clic en Nuevo. Se abrirá el Asistente para reglas. Lea el resumen y haga clic en Siguiente.
3. Active la casilla de verificación situada junto al nombre de la cámara. Si es una cámara PTZ, active la casilla de verificación de la posición del recorrido de la cámara.
4. En la lista desplegable Seleccionar un motor de video para los que se ejecutan en una cámara, seleccione VE130 – Detección de movimiento simple.
5. Utilice la imagen del vídeo en pantalla para definir el área en rojo (una máscara) en la que se deben definir alarmas. (Si no está seguro de entender el concepto, consulte la sección Máscara de movimiento frente a Máscara de alarma.)
• Seleccione la opción Borrar para eliminar la máscara roja.
• Seleccione la opción Trazar para trazar la máscara roja.
• El control deslizante Tamaño ajusta el grosor del lápiz.
6. (Opcional) Sub eventos: consulte el contenido de Reglas.
7. Haga clic en Siguiente para continuar en el Asistente para reglas. Configure las reglas según los conceptos y las instrucciones de Reglas: uso del Asistente para reglas.
Aunque el motor VE130 requiere un uso inferior de la CPU que otros motores de vídeo, sigue siendo necesario descomprimir el vídeo en el servidor para su análisis. Por este motivo, el ahorro de CPU es limitado. |
Si se producen demasiadas falsas alarmas debido a sombras, lluvia u otras condiciones ambientales, utilice el VE150.